







步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度/(转子齿数运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(504)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
转速(Rotational Speed或Rev):是做圆周运动的物体单位时间内沿圆周绕圆心转过的圈数(与频率不同)。常见的转速有额定转速和最大转速等。
硬盘转速以每分钟多少转来表示,单位表示为RPM,RPM是Revolutions Per minute的缩写,是转/每分钟。RPM值越大,内部传输率就越快,访问时间就越短,硬盘的整体性能也就越好。
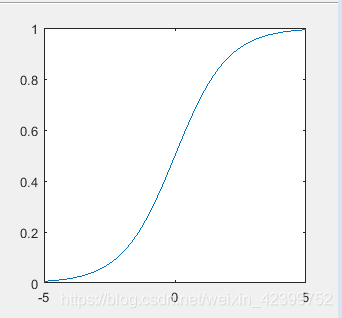
S型曲线的的方程:
y=1/(1+exp(-x));
x在[-5,5]的图形如下图所示:
在Matlab软件中代码如下:
x=-5:0.01:5;
y=1./(1+exp(-x));
plot(x,y);
如要将此曲线应用在步进电机的加、减速过程中,需要将方程在XY坐标系进行平移,同时对曲线进行拉升变化:
Y=A+B/(1+exp(-ax+b));
其中的A分量在y方向进行平移,B分量在y方向进行拉伸,ax+b分量在x方向进行平移和拉伸。
其中的A分量在y方向进行平移,B分量在y方向进行拉伸,ax+b分量在x方向进行平移和拉伸。
项目中加速过程:从600Hz加速到20000Hz,采用4细分。输出比较模块所用的定时器驱动频率为10M,采用1000个点进行加速处理。最终根据项目的需要,在加速过程中采用的曲线方程为:
Fcurrent = Fmin + (Fmax-Fmin)/(1+exp( -flexible(i - num )/num) );*
步进电机S型曲线加减速算法与实现。
其中的Fcurrent为length(1000)个点中的单个频率值。Fmin起始频率为600; Fmax为最大频率20000; -flexible*(i - num)/num是对S型曲线进行拉伸变化,其中flexible代表S曲线区间(越大代表压缩的最厉害,中间(x坐标0点周围)加速度越大;越小越接近匀加速。理想的S曲
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









