







一、总体功能描述
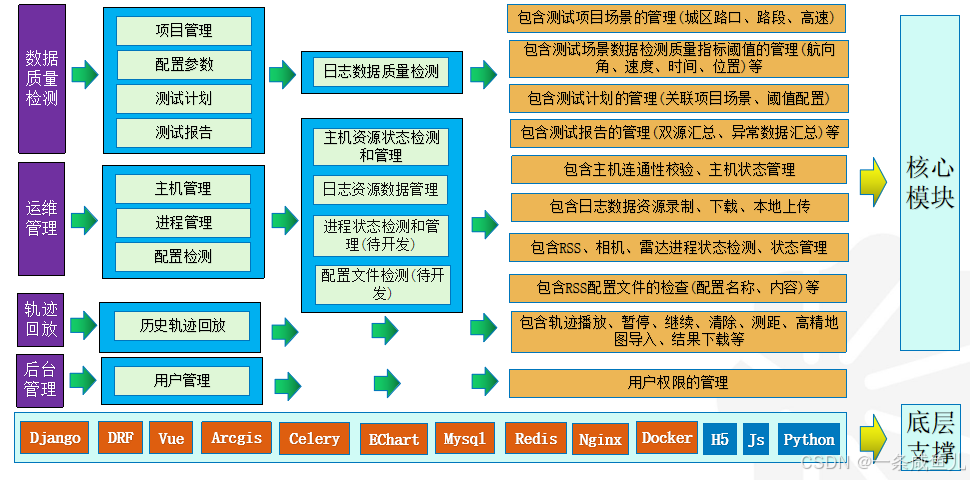
其中包含项目管理、配置管理、计划管理以及测试报告管理功能。项目管理用来管理整体测试项目场景。
配置管理用来管理所有场景下的阈值参数。测试计划管理用来管理整体测试任务。测试报告管理用来管理
整体测试输出的报告结果。将项目、配置、计划和报告加以关联,通过平台化的方式实现数据质量检测的目的,
达到自动化数据分析,大量提升人力手动分析数据的时间,并以平台化的方式更加直观通用,可维护性更高。
二、平台功能介绍
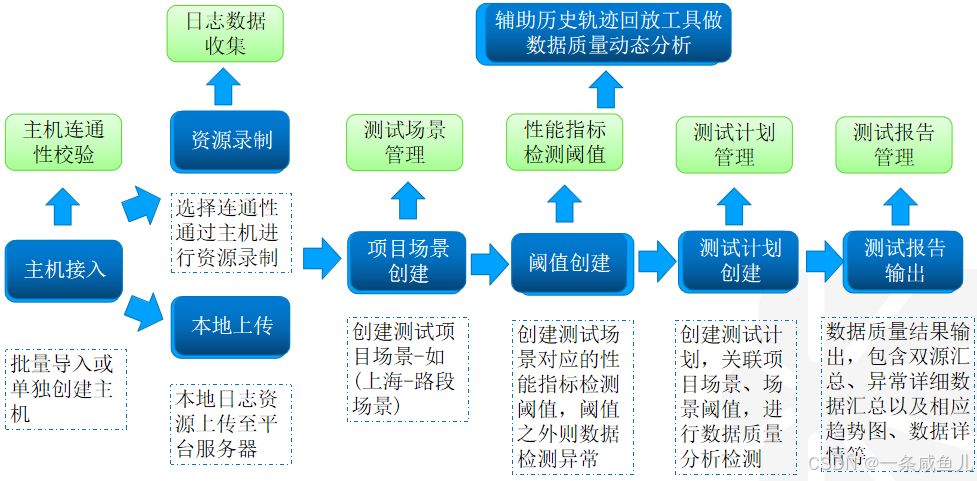
三、核心业务流程图
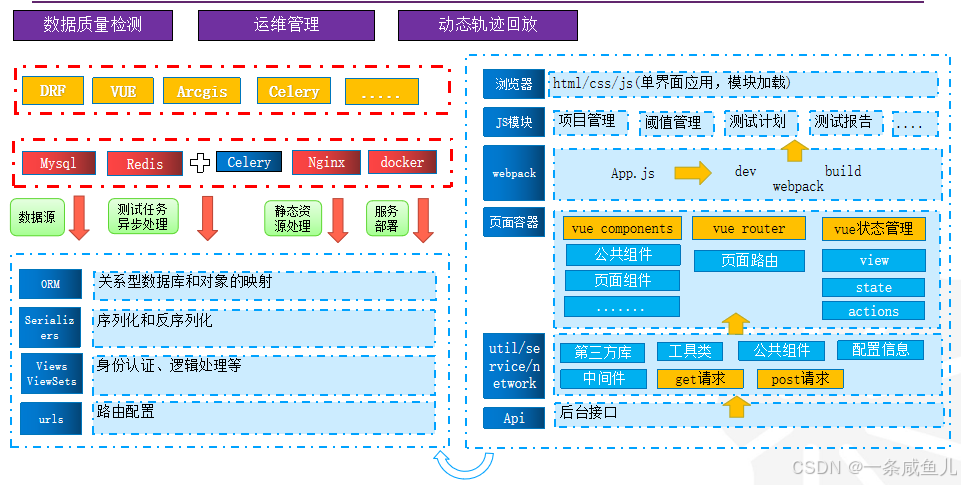
四、系统架构图
五、软件功能介绍
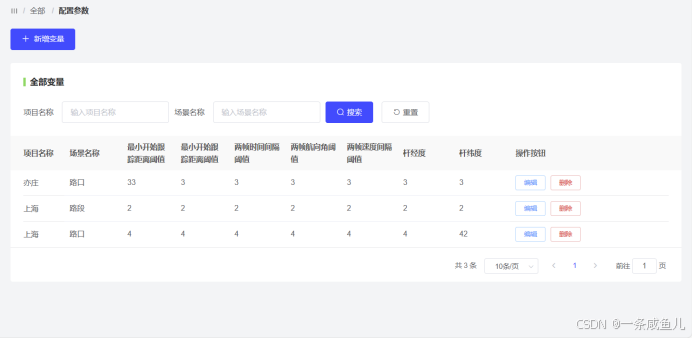
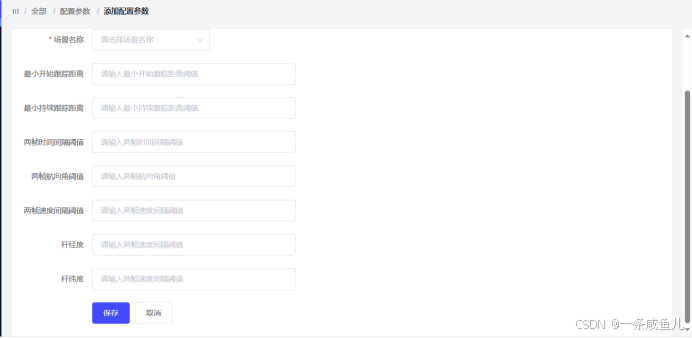
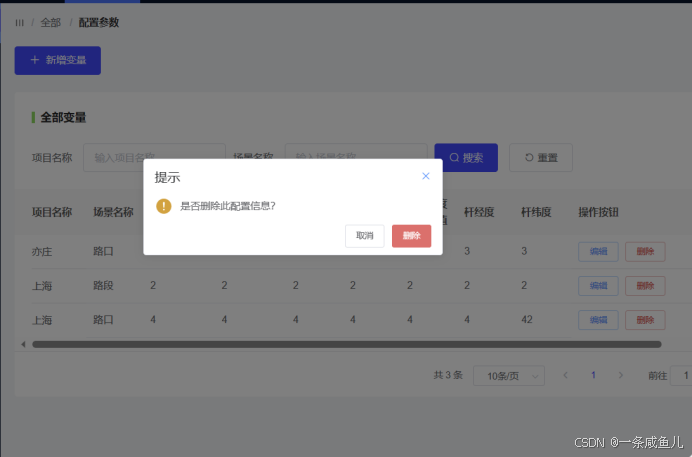
1、配置参数管理
包含项目名称、场景名称、数据质量分析的性能指标的阈值配置字段。以列表方式展示,可根据项目名称和
场景名称进行筛选。可对配置做新增、修改、删除操作。
配置参数列表:
新增/编辑配置:
删除配置:
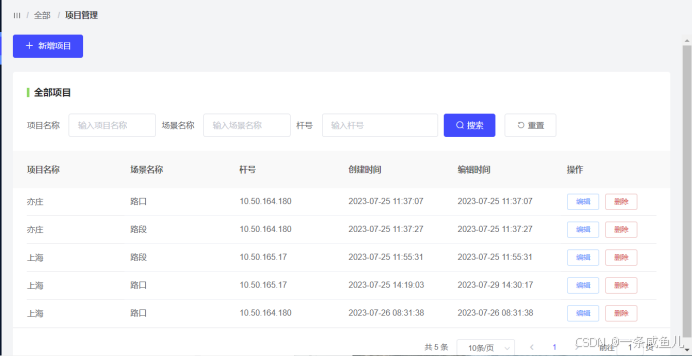
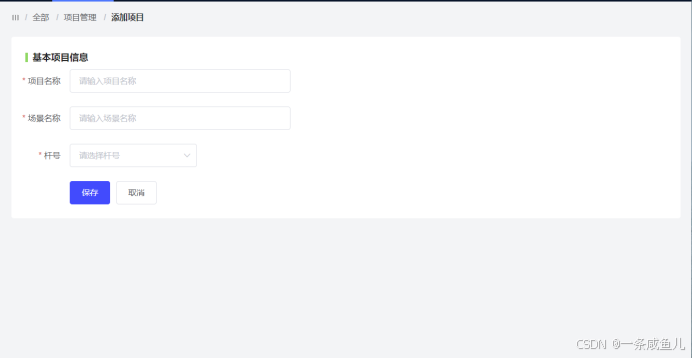
2、项目管理
包含项目名称、场景名称、杆号、创建时间、修改时间字段。以列表方式展示,可根据项目名称、
场景名称、杆号进行筛选。可对项目做新增、修改、删除操作。
项目列表:
新增项目:
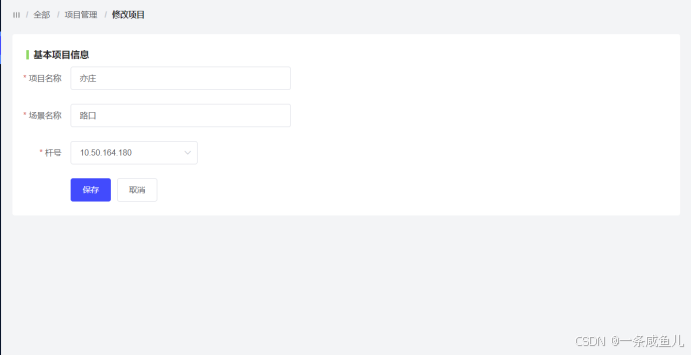
修改项目:
3、测试计划管理
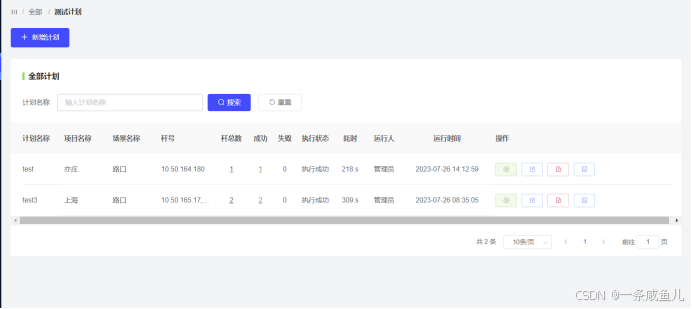
包含计划名称、项目名称、场景名称、杆号、杆总数、成功、失败、执行状态、耗时、执行人、运行时间
字段。以列表方式展示,可根据测试计划进行筛选。将测试计划与测试场景和配置参数进行关联执行,可
对计划做新增、修改、删除、执行以及关联配置参数的操作。
测试计划列表:
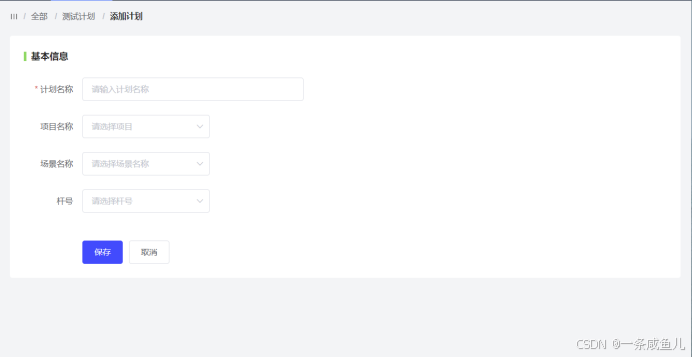
新增测试计划:
删除测试计划:
关联配置参数:

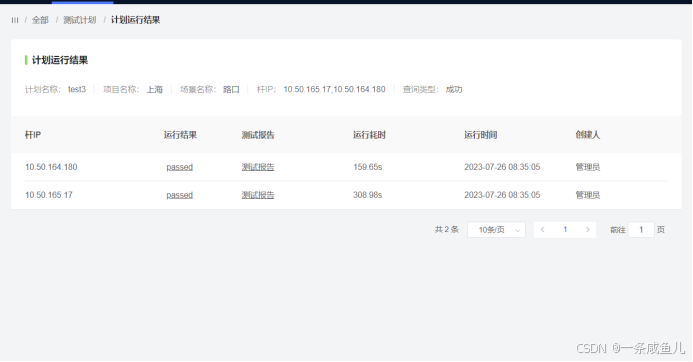
4、测试报告管理
包含项目名称、场景名称、杆号、运行结果、测试报告、运行时间字段。以列表方式展示,可根据项目名称
、场景名称、杆IP进行筛选。以列表和图形化的方式对整体数据分析结果做展示。可对报告做查询详情、
删除的操作。
测试报告列表:

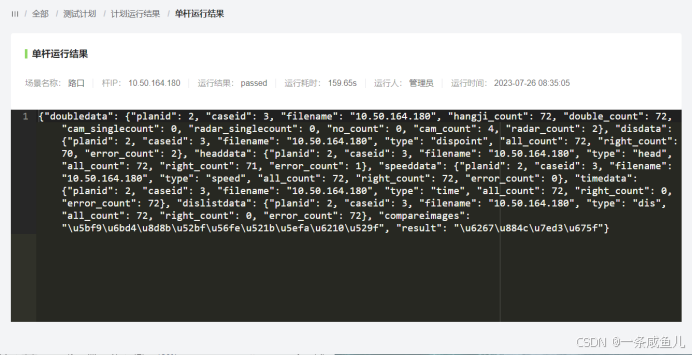
测试计划执行详情:
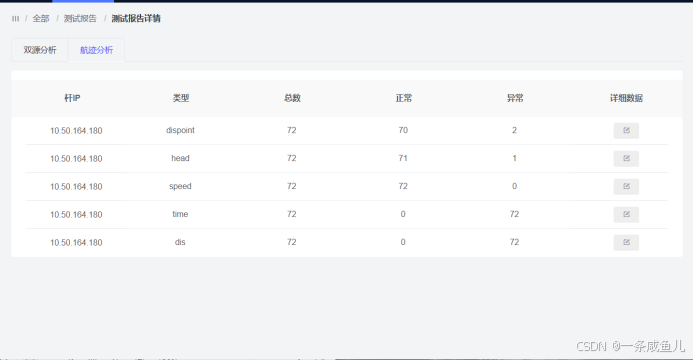
测试报告详情:
双源结果统计列表:主要显示数据中的单双源信息以及相机雷达是否发生跳变

航迹分析统计列表:主要显示性能指标总体统计结果,正常以及异常数据的数量。(包括航向角、ID最小跟踪距离是否合理、速度、两帧时间差、两帧间距)
双源分析详情数据
主要展示日志数据中相对应的融合、相机、雷达ID对应列表,以更快的进行数据定位
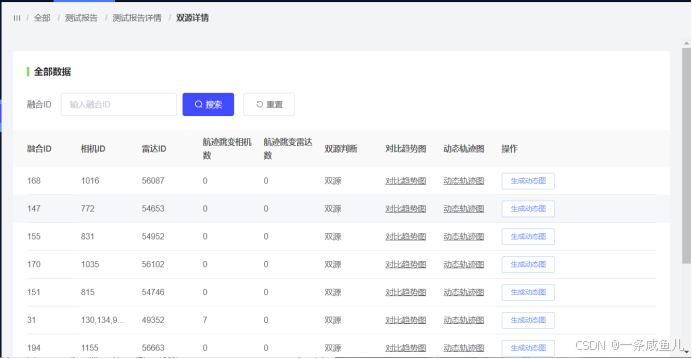
进入相应的轨迹图页面,悬停展示具体时间点的相应数据信息。以及相应工具栏工具,包含(保存图片、数据视图、转成柱形图等)

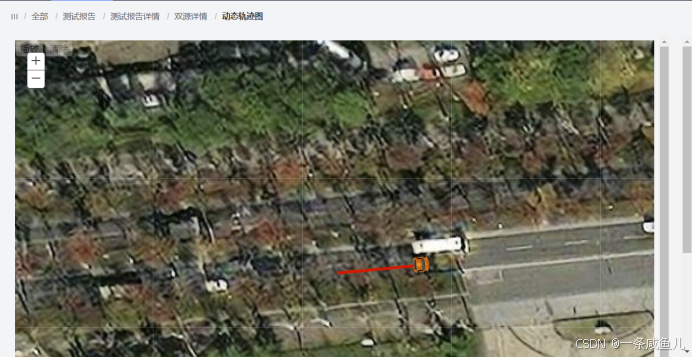
进入动态轨迹界面,可查看具体车辆ID对应的动态历史回放轨迹
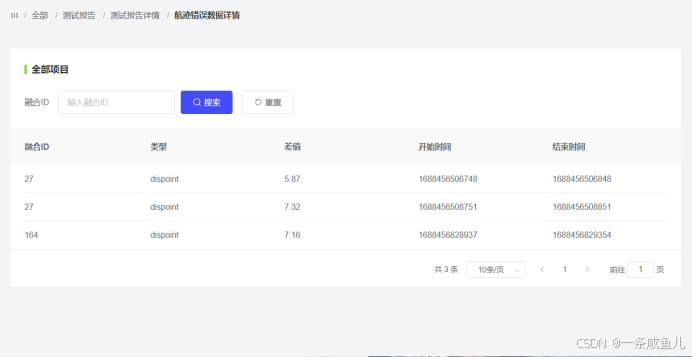
异常数据详情
针对于不同性能指标展示出具体对应车辆在具体时间点的错误异常数据值,加快了问题定位
淘宝购买链接:https://h5.m.taobao.com/awp/core/detail.htm?ft=t&id=773257274863



















 1974
1974

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











