




简介:本项目提供了一个步进电机控制的编程实践,主要利用STM32F407微控制器实现精密运动控制。项目涉及脉冲信号生成、步进电机速度与方向控制,以及利用STM32F407的GPIO和PWM功能,实现对步进电机的精确控制。包含源代码文件和相关配置,为学习嵌入式系统控制提供了一个完整的工程案例。 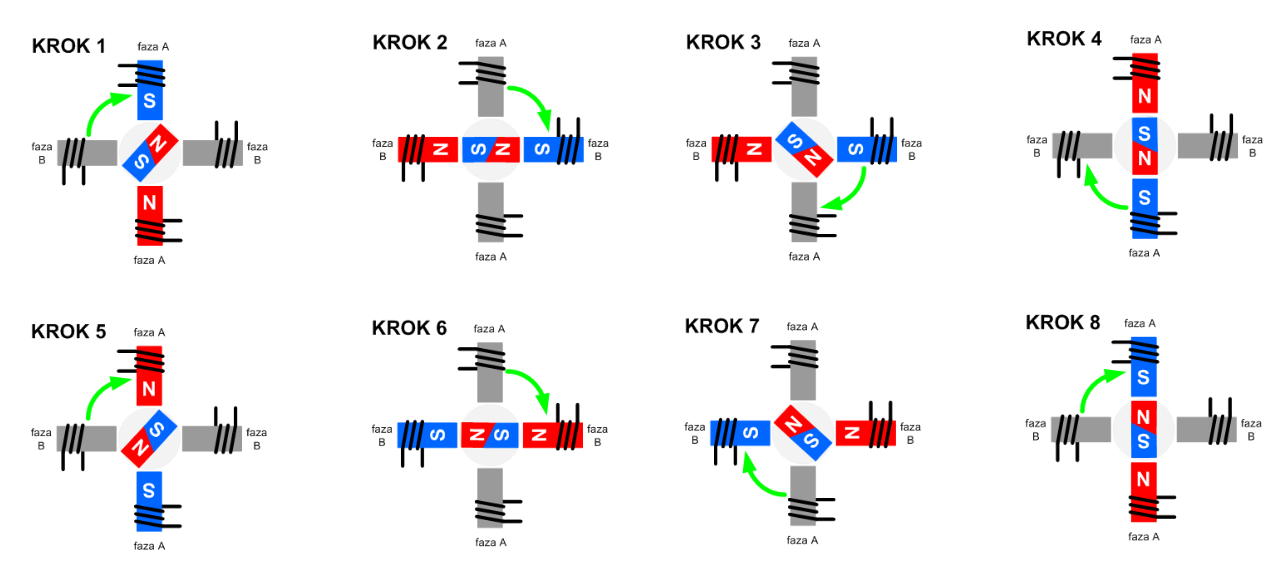
1. 步进电机控制项目概述
1.1 项目背景与目标
随着自动化技术的发展,步进电机在精确位置控制领域的应用变得越来越广泛。它们不仅在工业自动化设备、医疗仪器和机器人技术中起到关键作用,也逐渐渗透到日常消费电子产品中。本项目旨在通过掌握步进电机的工作原理和控制方法,实现精确的位置控制,提升设备执行效率和精度。
1.2 项目的技术要求
为了达到预期的控制目标,本项目需要深入理解步进电机的运动特性和控制策略,并将这些理论应用于实际的硬件控制之中。技术要求包括: - 准确的步进电机运动解析和控制。 - 实现步进电机的高速启动与制动。 - 实现步进电机的平稳加速和减速控制。
1.3 项目的意义与价值
通过本项目的研究与开发,不仅能够为相关领域的工程师提供实践参考,还能帮助他们更好地理解和掌握步进电机控制技术。此外,项目成果有望提高相关行业的生产效率,降低生产成本,具有显著的实用价值和经济效益。
2. STM32F407微控制器介绍及应用基础
2.1 STM32F407微控制器的特点
2.1.1 核心架构与性能参数
STM32F407微控制器是由STMicroelectronics(意法半导体)生产的一款高性能ARM Cortex-M4微控制器。核心架构方面,它采用了一个32位的ARM Cortex-M4内核,集成了浮点单元(FPU)和数字信号处理器(DSP),这使得它能够执行复杂的算法和数学运算。此外,它的处理速度最高可达168 MHz,拥有高达1MB的闪存和256KB的SRAM,以及丰富的外设接口,包括USB OTG、CAN、以及多种通信接口。
在性能参数方面,STM32F407具备以下特点:
- 内存 :拥有广泛的内存选项,支持高达1MB的内部Flash存储器和256KB的SRAM。
- 电源效率 :在低功耗模式下运行时,电流消耗可以低至2.5μA/MHz。
- 高性能 :支持最大168MHz的CPU频率,提供硬件乘法器和硬件除法器。
- 外设 :具备先进的外设接口,包括14通道的DMA、多个定时器、USB 2.0 OTG接口、CAN接口、以及用于音频处理的I2S接口。
- 安全特性 :包含一个硬件加密引擎,支持多种加密算法,适用于安全通信。
2.1.2 STM32F407的开发环境配置
对于开发STM32F407微控制器,通常使用的是Keil MDK-ARM,也就是μVision开发环境。以下是基本的开发环境配置步骤:
- 安装Keil MDK-ARM :访问ARM官方网站下载最新版本的Keil MDK-ARM软件。
- 获取固件库 :通常在购买STM32F407开发板时,会包含有STM32F4的HAL库和中间件库。
- 配置工程 :创建一个新工程,将固件库文件夹添加到工程中。这一步骤包括添加源文件(.c/.s文件)和头文件(.h文件)到工程中。
- 选择MCU型号 :在工程设置中,选择对应的STM32F407型号,确保软件能够正确识别MCU的特性。
- 配置时钟和外设 :根据项目需求,配置时钟树和需要使用的外设。
- 下载和安装调试器驱动程序 :如果使用的是STLink调试器,则需要下载并安装STLink驱动程序。
完成以上步骤之后,就可以开始编写代码并进行编译、下载和调试了。
2.2 STM32F407与步进电机控制的关联
2.2.1 微控制器在步进电机中的作用
STM32F407微控制器在步进电机控制中的主要作用是提供精确的时序控制。通过使用其内部的定时器和高级控制功能,可以产生准确的脉冲信号来驱动步进电机。这些脉冲信号控制步进电机的步数、方向和速度。除了基本的控制之外,STM32F407还可以处理诸如位置反馈、速度控制等复杂的控制任务。
2.2.2 开发板和步进电机的接口配置
配置开发板与步进电机的接口通常涉及以下步骤:
- 确定步进电机参数 :了解步进电机的电压、电流和步距角等参数。
- 选择驱动器 :根据步进电机的参数选择适合的步进电机驱动器(例如ULN2003、L298N等)。
- 连接控制接口 :将开发板的GPIO引脚通过步进电机驱动器连接到步进电机。确保电源和地线正确连接。
- 测试接口 :编写测试代码,通过发送脉冲信号验证电机是否能够按照预期响应。
例如,以下是连接STM32F407和步进电机驱动器的简化步骤:
- 连接驱动器的输入端口到STM32F407的GPIO引脚。
- 驱动器的电源和地线连接到电机电源。
- 将步进电机的线圈端接到驱动器的输出端口。
- 编写代码在STM32F407上产生脉冲序列,通过调节脉冲频率控制电机的转速。
在配置接口时,还需要确保驱动器和步进电机的电压和电流等级相互匹配,避免损坏硬件。
3. 步进电机工作原理及控制策略
3.1 步进电机的工作原理
步进电机是一种电机,它将电脉冲信号转换为角位移或线位移。这种电机不需要反馈信号来控制位置,因此在工业自动化中广泛用于精确的位置控制。
3.1.1 步进电机的结构组成
步进电机通常由定子(固定部分)、转子(旋转部分)、磁极和线圈等基本部件组成。按转子的构造不同,步进电机可以分为永磁式、变阻式和混合式。
- 永磁式步进电机在转子内部使用了永磁材料,转动需要外部脉冲信号来激发。
- 变阻式步进电机内部通常使用电阻材料来产生磁场。
- 混合式步进电机结合了永磁和变阻两种设计,利用了两者的优势,提供较高的扭矩和较好的动态响应。
每一种类型的步进电机都有其特定的应用场合,选择哪一种取决于特定应用的要求,如扭矩大小、精确度、响应速度和成本等因素。
3.1.2 步进电机的运动原理
步进电机工作的基本原理是通过向电机的定子线圈施加一系列的脉冲电压,产生电场,这个电场推动转子旋转,每接收一个脉冲,转子就会转动一个固定的角度,称为“步距角”。这个过程可以重复,从而使电机产生精确的连续旋转。
3.2 步进电机的控制方式
3.2.1 全步进与半步进模式
步进电机的控制模式主要有全步进模式和半步进模式。
-
在全步进模式下,每接收到一个脉冲信号,步进电机转动的步距角是固定的。例如,如果步距角为1.8度,则每收到一个脉冲,转子会转动1.8度。
-
半步进模式则是在全步进模式的基础上,通过不同的相序激发定子线圈,使得步距角减小到全步进模式下的一半。在1.8度步距角的步进电机中,半步进模式下步距角变为0.9度。这种模式可以提供更精确的控制,但会增加电路的复杂度和控制的难度。
3.2.2 步进电机的加速与减速控制
步进电机的加速和减速控制对提高整个系统的性能至关重要。为了防止电机失步或失步,需要对步进电机进行适当的加速和减速控制。
加速过程中,通常逐步增加给步进电机脉冲的频率,避免超过电机的响应能力。类似地,在减速过程中,则逐步减少脉冲的频率。如果步进电机在加速或减速期间失去同步,就需要执行所谓的“重新同步”操作,或者在设计时引入适当的保护措施。
加速和减速控制通常通过软件算法实现,例如,可以在微控制器中编写代码来调节脉冲信号的生成频率。
在下一章节,我们将深入探讨如何实现步进电机控制的代码逻辑,并展示具体的算法实现和分析。
4. 步进电机控制代码实现与算法分析
4.1 脉冲分配算法实现
4.1.1 脉冲分配的基本原理
脉冲分配是步进电机控制中的核心环节,它负责将微控制器发出的脉冲信号合理地分配给步进电机的各个绕组,以实现精确的步进运动。在步进电机的控制中,每产生一个脉冲信号,步进电机就会转动一个步距角,从而实现位置的精确控制。脉冲分配算法的目的是按照一定的顺序,将脉冲信号分配到电机绕组,从而产生所需的方向和速度。
在实现脉冲分配时,需要考虑步进电机的类型(如双极性或单极性)和控制模式(全步进或半步进)。全步进模式下,每次脉冲信号移动一个完整的步距;而半步进模式下,每次脉冲信号则移动半个步距,这通常需要更复杂的脉冲分配策略来实现更平滑的运动。
4.1.2 脉冲分配算法的编程实现
以下是使用C语言在STM32F407微控制器上实现的脉冲分配算法的一个简单示例:
#include "stm32f4xx_hal.h"
// 假设使用GPIO输出脉冲信号
#define MOTOR_PULSE_PIN GPIO_PIN_0 // 定义脉冲输出引脚
#define MOTOR_GPIO_PORT GPIOA // 定义脉冲输出端口
void HAL_GPIO_TogglePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void motor_step_sequence(int direction);
int main(void)
{
HAL_Init(); // 初始化HAL库
// ... 其他初始化代码 ...
while(1)
{
// 控制电机正转或反转
motor_step_sequence(1); // 方向参数,1为正转,-1为反转
HAL_Delay(10); // 步进延时
}
}
void motor_step_sequence(int direction)
{
static int step = 0; // 步进序列索引
static int step_table[] = {0x09, 0x0C, 0x06, 0x03}; // 半步进模式序列
// 计算下一个步进状态
step += direction;
if(step >= 4) step = 0;
if(step < 0) step = 3;
// 输出到步进电机驱动器的引脚
uint16_t pulse组合 = step_table[step];
HAL_GPIO_WritePin(MOTOR_GPIO_PORT, MOTOR_PULSE_PIN, (pulse组合 & 0x01) ? GPIO_PIN_SET : GPIO_PIN_RESET);
HAL_GPIO_WritePin(MOTOR_GPIO_PORT, MOTOR_PULSE_PIN << 1, (pulse组合 & 0x02) ? GPIO_PIN_SET : GPIO_PIN_RESET);
HAL_GPIO_WritePin(MOTOR_GPIO_PORT, MOTOR_PULSE_PIN << 2, (pulse组合 & 0x04) ? GPIO_PIN_SET : GPIO_PIN_RESET);
HAL_GPIO_WritePin(MOTOR_GPIO_PORT, MOTOR_PULSE_PIN << 3, (pulse组合 & 0x08) ? GPIO_PIN_SET : GPIO_PIN_RESET);
}
在此代码示例中, motor_step_sequence 函数根据步进序列索引 step 从步进序列表 step_table 中获取当前的输出组合,并将其输出到步进电机的相应引脚上。序列表决定了步进电机绕组的激活顺序,根据这个顺序,步进电机可以实现精确的位置控制。
4.2 PWM调速技术应用
4.2.1 PWM调速的理论基础
脉冲宽度调制(Pulse Width Modulation,简称PWM)是一种通过改变脉冲宽度来控制功率输出的技术。在步进电机控制中,PWM可用于调节绕组中的电流大小,从而控制电机的转矩和运行速度。
PWM调速的基本原理是通过改变PWM信号的占空比来改变电机绕组中平均电压的大小。占空比越高,电机绕组中的电流越大,电机的转矩也相应越大;反之,占空比越低,电流越小,转矩也越小。通过调整占空比,可以在不改变电机供电电压的情况下,实现对电机速度的精细控制。
4.2.2 PWM调速在步进电机中的编程应用
下面给出一个简单示例,展示如何在STM32F407微控制器上使用定时器产生PWM信号,用于步进电机的速度控制。
#include "stm32f4xx_hal.h"
TIM_HandleTypeDef htim2; // 定义定时器句柄
void MX_TIM2_Init(void);
int main(void)
{
HAL_Init(); // 初始化HAL库
MX_TIM2_Init(); // 初始化定时器2用于PWM输出
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1); // 启动PWM
while(1)
{
// 根据需要调整PWM占空比来控制速度
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, desired_duty_cycle);
HAL_Delay(1000); // 简单的延时循环,可根据需要调整延时时间
// 为了展示速度调整,此处代码会根据某些条件调整desired_duty_cycle的值
}
}
void MX_TIM2_Init(void)
{
TIM_OC_InitTypeDef sConfigOC = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = (uint32_t)(SystemCoreClock / 1000000) - 1; // 1MHz
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 1000 - 1; // 1kHz PWM频率
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
HAL_TIM_PWM_Init(&htim2);
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 500; // 初始占空比50%
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1);
}
在这个示例中, MX_TIM2_Init 函数初始化了定时器2,并设置了PWM的频率和初始占空比。 __HAL_TIM_SET_COMPARE 宏用于改变PWM的占空比,从而调整步进电机的转速。通过调整 desired_duty_cycle 变量的值,可以实现对步进电机速度的实时控制。
4.2.3 PWM调速的高级应用
在实际应用中,除了基础的PWM调速之外,还可能会用到更高级的技术,如电流控制和速度控制的闭环反馈机制。这些技术能够根据电机实际的运行状态来动态调整PWM信号,以达到更加精确和稳定的控制效果。下面将展示一个简单的电流检测反馈控制示例。
float measured_current; // 实际电流值,假设通过某种方式测量得到
// 假设控制算法为简单的PI控制器
float Kp = 1.0; // 比例增益
float Ki = 0.1; // 积分增益
float integral = 0.0; // 积分项
void update_pwm_duty_cycle(float desired_current)
{
float error = desired_current - measured_current; // 计算偏差
integral += error; // 更新积分项
float output = Kp * error + Ki * integral; // PI控制器输出
// 将控制器输出限制在PWM可接受范围内
if(output > 100.0) output = 100.0;
if(output < 0.0) output = 0.0;
// 更新PWM占空比
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, (uint32_t)output);
}
在这个高级示例中, update_pwm_duty_cycle 函数使用了一个简单的PI控制器来根据电流测量值和期望电流值的偏差调整PWM占空比,以维持电机的稳定运行。通过实时调整PWM信号,可以实现对电机转矩和速度的精确控制。
通过以上示例的介绍,我们看到步进电机控制代码实现与算法分析不仅涉及到核心的脉冲分配策略,还包括了利用PWM进行电机转速控制的基础和进阶应用。在实际应用中,根据步进电机的具体参数和使用环境,还需要对这些控制策略进行进一步的优化与调整。
5. 步进电机驱动电路与控制系统的集成
5.1 步进电机驱动电路设计
步进电机驱动电路是将微控制器输出的信号转换为电机能够识别的驱动电流和电压的重要部分。驱动电路的设计必须考虑电流、电压和功率的匹配,以确保步进电机能够有效、可靠地工作。
5.1.1 驱动电路的构成和工作原理
步进电机驱动电路通常包括以下几个主要部分:
- 控制器接口 :接收来自微控制器的信号,如方向和脉冲信号。
- 驱动器 :根据脉冲信号控制电机的运转状态。
- 功率放大 :放大来自驱动器的信号,为电机提供足够的电流和电压。
- 保护电路 :防止过流、过压和电机短路等问题。
在设计驱动电路时,常见的驱动方式包括双极性和单极性驱动。双极性驱动使用H桥电路,能够为步进电机提供双向电流,适用于高扭矩应用。单极性驱动则需要更少的驱动元件,适用于扭矩要求相对较低的应用。
5.1.2 驱动电路的设计要点与调试方法
设计驱动电路时需要考虑的关键因素有:
- 电流和电压额定值 :电路组件必须能承受电机在满负荷工作时的最大电流和电压。
- 散热设计 :高功率工作时会产生大量热量,散热设计需确保电路组件不会过热。
- 电气隔离 :为避免电路中出现不必要的干扰,驱动电路与控制电路间应进行适当的电气隔离。
调试驱动电路时,常见的步骤包括:
- 确认电路连接正确无误。
- 逐渐增加驱动电流,观察电机运转状态,确保无跳步或失步现象。
- 检查电路温度,确保在安全工作温度范围内。
- 使用示波器检测脉冲波形和电流波形,确保信号的干净和准确。
graph LR
A[微控制器] -->|控制信号| B[驱动电路]
B -->|电流/电压| C[步进电机]
C -->|运动| D[负载]
B -->|反馈信号| E[电流/电压检测]
E -->|反馈信息| A
5.2 PID控制算法在步进电机中的应用
PID(比例-积分-微分)控制是一种常见的反馈控制算法,广泛应用于工业控制系统中,以实现精确的运动控制。
5.2.1 PID控制算法的理论基础
PID控制器通过调整输出,来减小系统误差(即设定点与实际值之间的差异)。PID算法的三个主要组成部分分别执行以下功能:
- 比例(P) :比例项负责调整输出,以应对当前的误差。
- 积分(I) :积分项负责累积误差,并对长期误差进行调整。
- 微分(D) :微分项预测误差的未来趋势,以减小超调和振荡。
5.2.2 PID控制算法在步进电机中的实现步骤
在步进电机控制中实现PID算法的步骤通常包括:
- 初始化PID控制器参数 :根据电机特性和系统要求设定合适的PID参数。
- 读取反馈值 :从编码器或传感器获取步进电机的位置或速度信息作为反馈值。
- 计算误差 :根据设定点和实际反馈值计算当前误差。
- 执行PID计算 :根据PID算法和误差值计算输出。
- 调整步进电机 :将PID控制器的输出应用到电机驱动器,调整步进电机的运动状态。
- 反馈调整 :持续读取反馈值,进行PID参数的实时调整以优化控制性能。
5.2.3 PID控制算法的调试与优化策略
调试PID控制器时,可以采用以下策略:
- 逐步调整参数 :先调整比例项,再逐步增加积分项和微分项。
- 使用Ziegler-Nichols方法 :该方法提供了根据系统响应来快速设定PID参数的指导。
- 实施限幅 :限制PID控制器的输出以防止电机过激响应。
- 记录响应曲线 :在调整参数时,记录系统响应曲线可以帮助分析性能并进行进一步优化。
最终,通过连续的测试和调整,可以确保PID控制器为步进电机提供了平滑、准确和快速的响应,以满足控制系统的性能需求。
简介:本项目提供了一个步进电机控制的编程实践,主要利用STM32F407微控制器实现精密运动控制。项目涉及脉冲信号生成、步进电机速度与方向控制,以及利用STM32F407的GPIO和PWM功能,实现对步进电机的精确控制。包含源代码文件和相关配置,为学习嵌入式系统控制提供了一个完整的工程案例。

















 2319
2319

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









