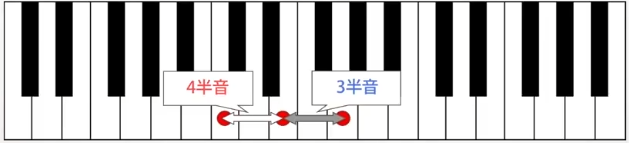
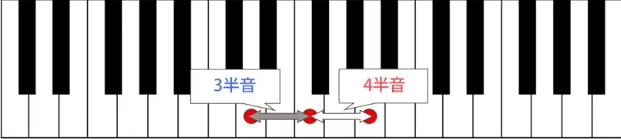
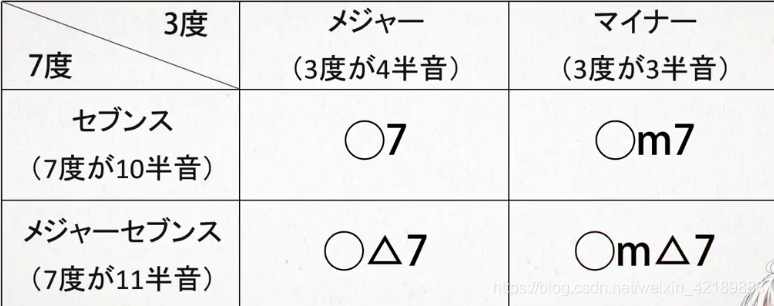
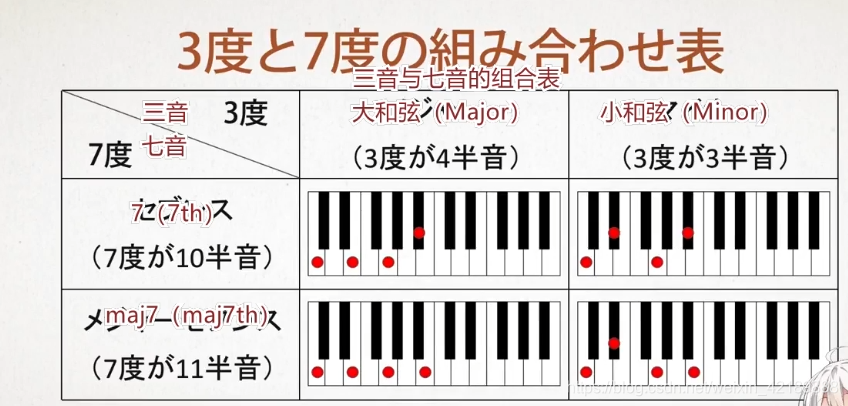
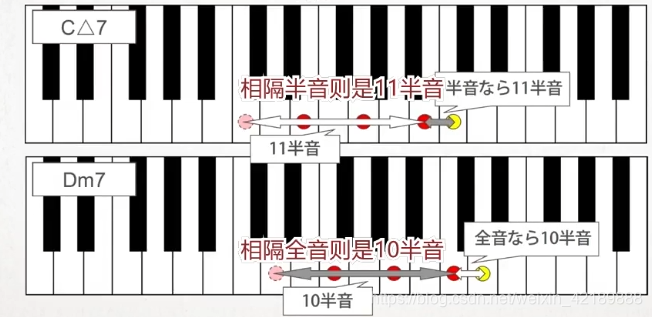
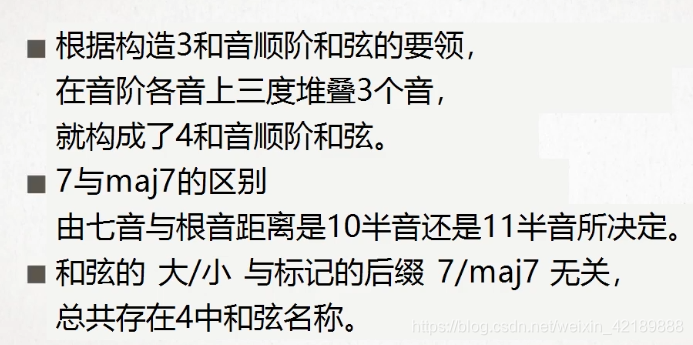
c大调顺阶和弦: 大和弦:C、F、G 小和弦:Dm、Em、Am、Bm 大和弦根音到三度之间有四个半音;三度到五度之间有三个半音 小和弦根音到三度之间有三个半音;三度到五度之间有四个半音(除了Bm) 只要将大和弦的三度音降半音就可以得到小和弦了。 特殊的,Bm从根音到三度音、从三度音到五度音都是三个半音。 四和音和弦: 有没有三角号是看根音到七音的半音数是10还是11 判断根音和七音相隔十个半音还是十一个半音的方法 向高音移动一个八度,比这个音小一个半音则相隔11半音,比这个音小一个全音则相关10个半音


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 本文详细介绍了C大调顺阶和弦(C-F-G)、小和弦(Dm-Em-Am-Bm)的构造,以及如何通过半音变化从大和弦到小和弦。特别讲解了四和音和弦中根音与七音间半音数的判断方法。涵盖了音乐理论的基础知识,适合对和弦音乐结构感兴趣的读者。
本文详细介绍了C大调顺阶和弦(C-F-G)、小和弦(Dm-Em-Am-Bm)的构造,以及如何通过半音变化从大和弦到小和弦。特别讲解了四和音和弦中根音与七音间半音数的判断方法。涵盖了音乐理论的基础知识,适合对和弦音乐结构感兴趣的读者。



















 948
948





