







 本文档详细介绍了FF-A(Firmware Framework Architecture)中的Setup和Discovery接口,包括FFA_VERSION、FFA_FEATURES等接口的使用、功能和兼容性要求。FF-A是一个在ARM TrustZone环境中用于安全软件的框架,这些接口用于不同组件间版本的探测和兼容性检查,确保安全分区的正确运行。
本文档详细介绍了FF-A(Firmware Framework Architecture)中的Setup和Discovery接口,包括FFA_VERSION、FFA_FEATURES等接口的使用、功能和兼容性要求。FF-A是一个在ARM TrustZone环境中用于安全软件的框架,这些接口用于不同组件间版本的探测和兼容性检查,确保安全分区的正确运行。
快速链接:
.
👉👉👉 个人博客笔记导读目录(全部) 👈👈👈
- 付费专栏-付费课程 【购买须知】:
- 【精选】ARMv8/ARMv9架构入门到精通-[目录] 👈👈👈 — 适合小白入门
- 【目录】ARMv8/ARMv9架构高级进阶-[目录]👈👈👈 — 高级进阶、小白勿买
- 【加群】ARM/TEE/ATF/SOC/芯片/安全-学习交流群 — 加群哦

目录
- Chapter 14 Setup and discovery interfaces
Chapter 14 Setup and discovery interfaces
14.1 Compliance requirements
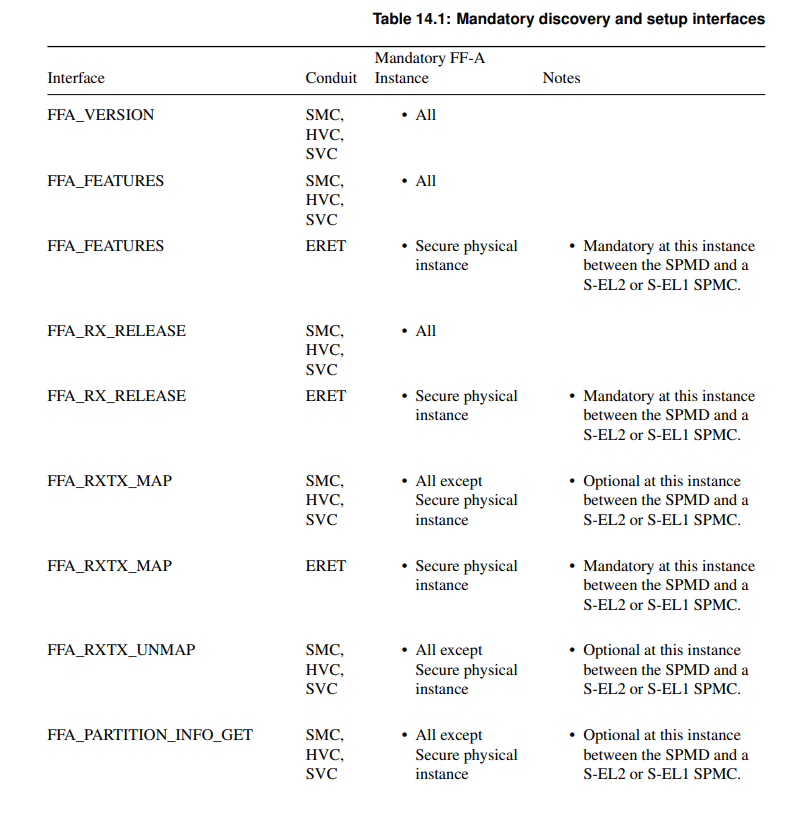
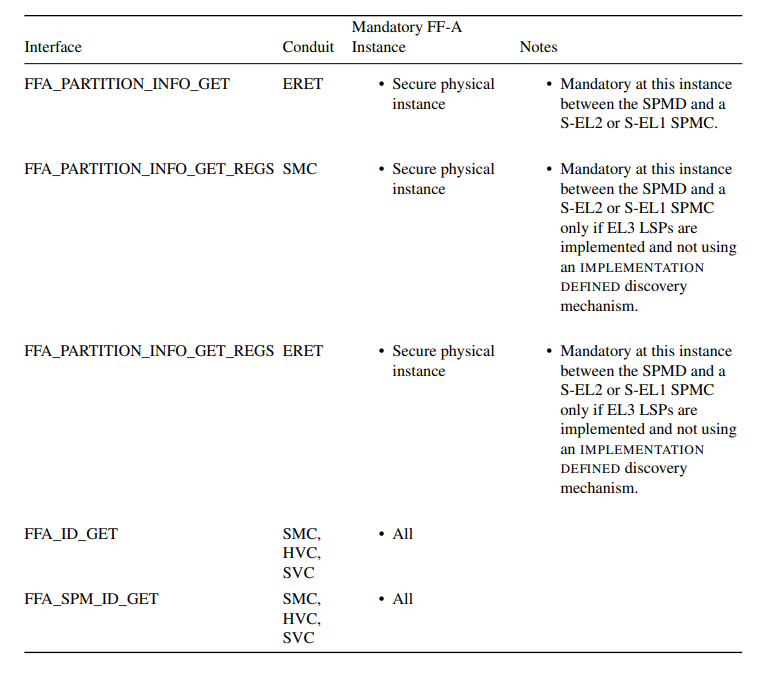
表14.1:发现和设置接口
该表列出了在给定的FF-A实例中必须使用特定导管实现的发现和设置接口。
- 在表中未列出但在相应接口描述中列出的接口和导管组合是可选的。
- 在表14.1和相应接口描述中均未列出的接口和导管组合不受支持。
14.2 FFA_VERSION
Description
FFA_VERSION函数
- 返回FF-A实例中Firmware Framework实现的版本,如14.2.1概述中所述。
- 表14.3列出了有效的FF-A实例和导管。
- 该函数的语法在表14.4中描述。

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1297
1297

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











