







第一课 线性回归模型
模型简述
以预测房价为例,影响房价的只有两个因素:面积(平方米)以及房龄(年)。这里影响房价的因素称为特征(feature),真实的房价称为标签(label)。假设房价与特征之间呈线性相关,我们就可以构建一个线性回归模型如下:
price
=
ω
a
r
e
a
⋅
x
a
r
e
a
+
ω
a
g
e
⋅
x
a
g
e
+
b
\text{price}=\omega_{area}\cdot x_{area}+\omega_{age}\cdot x_{age}+b
price=ωarea⋅xarea+ωage⋅xage+b
ω
a
r
e
a
\omega_{area}
ωarea和
ω
a
g
e
\omega_{age}
ωage绝对值的大小表明了面积以及房龄对房价的影响程度,
b
b
b修正偏差。
ω
a
r
e
a
,
ω
a
g
e
\omega_{area},\omega_{age}
ωarea,ωage以及
b
b
b都是待训练优化的参数。
数据集
用于训练模型的所有样本全体称为训练集(traning set),在本例中,一栋房子就是一个样本(sample),包含两个特征:面积以及房龄,已知真实房价。
损失函数
损失函数也是模型训练的目标函数,通常衡量的是真实值与模型预测值之间的偏差。偏差越小,说明模型预测的结果越好。本例损失函数可写为均方误差形式:
L
(
w
,
b
)
=
1
n
∑
i
=
1
n
1
2
(
w
T
x
(
i
)
+
b
−
y
(
i
)
)
L(\textbf{w},b)=\frac{1}{n}\sum_{i=1}^n\frac{1}{2}(\textbf{w}^T\text{x}^{(i)}+b-y^{(i)})
L(w,b)=n1i=1∑n21(wTx(i)+b−y(i))
我们的目标就是最小化损失函数。
优化函数-随机梯度下降法
这里的优化函数其实就是指更新(本例就是
w
\text{w}
w和
b
b
b)参数的方法。我们初始化的模型参数必然会使得预测值与真实值相差很大(即上述的损失函数值很大),这时,就需要更新参数来使得损失函数值变小。本例采用的随机梯度下降法,它的思想就是函数沿着负梯度方向下降最快。具体实现:先随机初始化模型参数,接下来对参数进行多次迭代。每次迭代过程中,随机均匀采样一个固定数目的训练样本组成小批量(mini-batch)
B
\mathcal{B}
B,然后求小批量样本数据的平均损失对模型参数的导数(梯度),沿负梯度方向下降,即模型参数直接减去梯度值即可,但通常会在梯度前乘以一个[0,1]之间的数,为下降步长,又称学习率(learning rate)。
(
w
,
b
)
←
(
w
,
b
)
−
η
∣
B
∣
∑
i
∈
B
∂
(
w
,
b
)
l
(
i
)
(
w
,
b
)
(\textbf{w},b)\leftarrow(\textbf{w},b)-\frac{\eta}{|\mathcal{B}|}\sum_{i\in\mathcal{B}}\partial_{(\textbf{w},b)}l^{(i)}(\textbf{w},b)
(w,b)←(w,b)−∣B∣ηi∈B∑∂(w,b)l(i)(w,b)
线性回归的代码实现
代码实现会采用两种方法,一种从零实现,一种利用torch线性模块实现。我们首先比较矢量计算用for循坏实现以及直接矢量相加实现,其运行速度的快慢有何不同。(虽然我们早就心知肚明)
import torch
import time
n = 1000
a = torch.ones(n)
b = torch.ones(n)
# define a timer class to record time
class Timer(object):
def __init__(self):
self.times = []
self.start()
def start(self):
# start the timer
self.start_time = time.time()
def stop(self):
# stop the timer and record time into a list
self.times.append(time.time() - self.start_time)
return self.times[-1]
def avg(self):
# calculate the average and return
return sum(self.times)/len(self.times)
def sum(self):
# return the sum of recorded time
return sum(self.times)
# for循环
timer = Timer()
c = torch.zeros(n)
for i in range(n):
c[i] = a[i] + b[i]
print('%.5f sec' % timer.stop())
# 矢量相加
timer.start()
c = a + b
print('%.5f sec' % timer.stop())
输出:
0.01325 sec
0.00000 sec
time.time()函数返回的是从1970-01-01 00:00:00起到当前时间,按秒计算,输出为过去多少秒。后者比前者快。
线性回归从零开始实现
import torch
from IPython import display
from matplotlib import pyplot as plt
import numpy as np
import random
# 生成数据集
# set input feature number
num_inputs = 2
# set examples number
num_example = 1000
#set ture weight and bias in order to generate corresponded label
true_w = [2,-3.4]
true_b = 4.2
features = torch.randn(num_example,num_inputs,dtype=torch.float32)
labels = true_w[0] * features[:,0] + true_w[1] * features[:,1] + true_b
# 由于真实标签与模型预测值是存在偏差的,因此这了添加了正态分布项来模拟真实值
labels += torch.tensor(np.random.normal(0,0.01,size=labels.size()),
dtype=torch.float32)
plt.scatter(features[:,1].numpy(),labels.numpy(),1)
plt.show()
# 读取数据集
def data_iter(batch_size,features,labels):
num_example = len(features)
indices = list(range(num_example))
random.shuffle(indices) # 将样本排序打乱
for i in range(0,num_example,batch_size):
j = torch.LongTensor(indices[i:min(i+batch_size,num_example)])
yield features.index_select(0,j), labels.index_select(0,j)
batch_size = 10
for X,y in data_iter(batch_size,features,labels):
print(X,'\n',y)
break
# 初始化模型参数
w = torch.tensor(np.random.normal(0,0.01,(num_inputs,1)),dtype=torch.float32)
b = torch.zeros(1,dtype=torch.float32)
# w和b是需要反向传播的
w.requires_grad_(requires_grad=True)
b.requires_grad_(requires_grad=True)
# 定义模型
def linreg(X,w,b):
return torch.mm(X,w) + b
# 定义损失函数
def squared_loss(y_hat,y):
# y.view是将y重新view成y_hat的size
return (y_hat - y.view(y_hat.size())) ** 2 / 2
# 定义优化函数
def sgd(params,lr,batch_size):
for param in params:
# ues .data to operate param without gradient track
param.data -= lr * param.grad / batch_size
# 训练
lr = 0.03
num_epochs = 5
net = linreg
loss = squared_loss
# traning
for epoch in range(num_epochs):
'''
training repeats num_epochs times
in each epoch, all the samples in dataset will be used once
X is the feature and y is the label of a batch sample
'''
for X,y in data_iter(batch_size,features,labels):
l = loss(net(X,w,b),y).sum()
# calculate the gradient of batch sample loss
l.backward()
# using small batch random gradient descent to iter model parameter
sgd([w,b],lr,batch_size)
#print(w,b)
# reset parameter gradient, avoid stacking
w.grad.data.zero_()
b.grad.data.zero_()
#print(w,b)
train_l = loss(net(features,w,b),labels)
print('epoch %d, loss %f' % (epoch+1,train_l.mean().item()))
print(w,true_w,b,true_b)
- numpy.random.normal(loc,scale,size)正态分布:
loc:float or array_like of floats,意义为概率分布的均值,对应分布中心;
scale:float or array_like of floats,意义为概率分布的标准差,对应于分布的宽度,scale越大越矮胖,scale越小,越瘦高。
size:int or tuple of ints, optional,表示输出的shape,默认为None,只输出一个值
标准的正态分布:numpy.random.normal(loc=0.0, scale=1.0, size=None) - torch.tensor是32-bit floating point,torch.LongTensor是64-bit integer (signed)。
- python中的yield函数,斐波那契数列
def fab(max):
n, a, b = 0, 0, 1
while n < max:
yield b
a, b = b, a + b
n = n + 1
for n in fab(5):
print(n)
简单地讲,yield 的作用就是把一个函数变成一个 generator,带有 yield 的函数不再是一个普通函数,Python 解释器会将其视为一个 generator,调用 fab(5) 不会执行 fab 函数,而是返回一个 iterable 对象!在 for 循环执行时,每次循环都会执行 fab 函数内部的代码,执行到 yield b 时,fab 函数就返回一个迭代值,下次迭代时,代码从 yield b 的下一条语句继续执行,而函数的本地变量看起来和上次中断执行前是完全一样的,于是函数继续执行,直到再次遇到 yield。(摘自菜鸟教程,https://blog.youkuaiyun.com/mieleizhi0522/article/details/82142856这篇博客也讲得很好)
- index_select(self,input,dim,index):dim表示选择的维度(比如按列选择还是按行选择),index表示根据选择的维度所挑选的数据下标
import torch
a = torch.linspace(1,16,steps=16).view(4,4)
print(a,a.shape)
# 挑选的数据下标
ind = torch.tensor([0,2])
# 0表示按行索引,1表示按列索引
b = torch.index_select(a,0,ind)
print(b)
# 第二种写法
c = a.index_select(0,ind)
print(c)
输出:
tensor([[ 1., 2., 3., 4.],
[ 5., 6., 7., 8.],
[ 9., 10., 11., 12.],
[13., 14., 15., 16.]]) torch.Size([4, 4])
tensor([[ 5., 6., 7., 8.],
[13., 14., 15., 16.]])
tensor([[ 5., 6., 7., 8.],
[13., 14., 15., 16.]])
- view函数,神经网络代码中还常见x.view(x.size()[0],-1),x.size()[0]通常表示batch_size,-1表示自适应(有这种情况,但不唯一)。
- 在pytorch里面,x.item()返回的是张量x里面的元素,而不是张量x。
import torch
x = torch.tensor([1])
y = x.item()
print(x,x.type())
print(y)
output:
tensor([1]) torch.LongTensor
1
线性回归模型的PyTorch实现
import torch
from torch import nn
import numpy as np
import torch.utils.data as Data
from torch.nn import init
import torch.optim as optim
torch.manual_seed(1)
torch.set_default_tensor_type('torch.FloatTensor')
# 生成数据集
num_inputs = 2
num_examples = 1000
true_w = [2,-3.4]
true_b = 4.2
features = torch.tensor(np.random.normal(0,1,(num_examples,num_inputs)),dtype=torch.float32)
labels = true_w[0] * features[:,0] + true_w[1] * features[:,1] + true_b
labels += torch.tensor(np.random.normal(0,0.01,size=labels.size()),dtype=torch.float32)
# 读取数据集
batch_size = 10
# combine features and labels of dataset
dataset = Data.TensorDataset(features,labels)
# put dataset into DataLoader
data_iter = Data.DataLoader(
dataset=dataset, # torch TensorDataset format
batch_size=batch_size, # mini batch size
shuffle=True, # whether shuffle the data or not
#num_workers=2, # read data in multithreading
)
for X,y in data_iter:
print(X,'\n',y)
break
# 定义模型
class LinearNet(nn.Module):
def __init__(self,n_feature):
super(LinearNet,self).__init__() # call father function to init
self.linear = nn.Linear(n_feature,1) # function prototype:'torch.nn.Linear(in_features,out_features,bias=True)'
def forward(self,x):
y = self.linear(x)
return y
net = LinearNet(num_inputs)
print(net)
net = nn.Sequential(
nn.Linear(num_inputs,1)
)
# 初始化参数模型
init.normal_(net[0].weight,mean=0.0,std=0.01)
init.constant_(net[0].bias,val=0.0) # or you can use 'net[0].bias.data.fill_(0)' to modify it directly
for param in net.parameters():
print(param)
# 定义损失函数
loss = nn.MSELoss() # nn built-in squared loss function
# function prototype: `torch.nn.MSELoss(size_average=None, reduce=None, reduction='mean')`
# 定义优化函数
optimizer = optim.SGD(net.parameters(),lr=0.03)
print(optimizer)
# 训练
num_epochs = 3
for epoch in range(1,num_epochs+1):
for X,y in data_iter:
output = net(X)
l = loss(output,y.view(-1,1))
optimizer.zero_grad()
l.backward()
optimizer.step()
print('epoch %d, loss: %f' % (epoch,l.item()))
dense = net[0]
print(true_w, dense.weight.data)
print(true_b,dense.bias.data)
构建多层网络的三种方法
from torch import nn
# method 1
net = nn.Sequential(
nn.Linear(num_inputs,1)
# other layers can be added here
)
# method 2
net = nn.Sequential()
net.add_module('Linear',nn.Linear(num_inputs,1))
# net.add_module ......
# method 3
from collections import OrderedDict
net = nn.Sequential(OrderedDict([
('linear', nn.Linear(num_inputs, 1))
# ......
]))
- torch.manual_seed(1):随机初始化种子,保证每次初始化的值相同
第二课 softmax和分类模型
softmax的基本概念
关于softmax的基本概念,课程中讲解的十分详细,且优快云上也有诸多相关文章,这里就不赘述。仅记下重要公式。
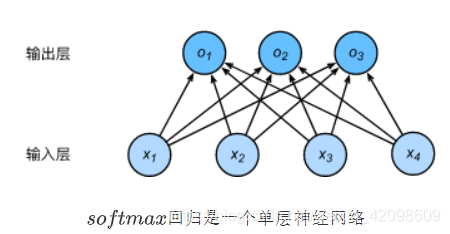
softmax回归模型
o
1
=
x
1
ω
11
+
x
2
ω
21
+
x
3
ω
31
+
x
4
ω
41
+
b
1
o_1=x_1\omega_{11}+x_2\omega_{21}+x_3\omega_{31}+x_4\omega_{41}+b_1
o1=x1ω11+x2ω21+x3ω31+x4ω41+b1
o 2 = x 1 ω 12 + x 2 ω 22 + x 3 ω 32 + x 4 ω 42 + b 2 o_2=x_1\omega_{12}+x_2\omega_{22}+x_3\omega_{32}+x_4\omega_{42}+b_2 o2=x1ω12+x2ω22+x3ω32+x4ω42+b2
o
3
=
x
1
ω
13
+
x
2
ω
23
+
x
3
ω
33
+
x
4
ω
43
+
b
3
o_3=x_1\omega_{13}+x_2\omega_{23}+x_3\omega_{33}+x_4\omega_{43}+b_3
o3=x1ω13+x2ω23+x3ω33+x4ω43+b3
x
i
x_i
xi表示第
i
i
i个特征,
o
i
o_i
oi表示是第
i
i
i类的得分,得分越高,为第
i
i
i类的可能性就越大。
由于直接输出后存在两个问题:
- 一方面,由于输出层的输出值的范围不确定,我们难以直观上判断这些值的意义。
- 另一方面,由于真实标签是离散值,这些离散值与不确定范围的输出值之间的误差难以衡量。
因此采用softmax运算将输出归一化到[0,1]之间,解决了这一问题。softmax运算具体表示:
y
^
i
=
exp
(
o
i
)
∑
j
=
1
3
exp
(
o
j
)
,
∑
i
y
^
i
=
1
\hat{y}^i=\frac{\exp{(o_i)}}{\sum_{j=1}^3\exp_{(o_j)}},\sum_i\hat{y}^i=1
y^i=∑j=13exp(oj)exp(oi),i∑y^i=1
因此,softmax回归模型(对单个样本)可简写为:
o
(
i
)
=
x
(
i
)
W
+
b
o^{(i)}=x^{(i)}W+b
o(i)=x(i)W+b
y
^
(
i
)
=
s
o
f
t
m
a
x
(
o
(
i
)
)
\hat{y}^{(i)}=softmax(o^{(i)})
y^(i)=softmax(o(i))
对应代码
def softmax(X):
X_exp = X.exp()
partition = X_exp.sum(dim=1, keepdim=True)
# print("X size is ", X_exp.size())
# print("partition size is ", partition, partition.size())
return X_exp / partition # 这里应用了广播机制
交叉熵损失函数
不采用平方损失函数,因为在这种多分类情况下,每个样本针对每个标签都有一个得分,但真实标签只是其中一个,平方损失函数的值会随着非标签的预测值浮动。
交叉熵(对单个样本)
H
(
y
(
i
)
,
y
^
(
i
)
)
=
−
∑
j
=
1
q
y
j
(
i
)
log
y
^
j
(
i
)
H(y^{(i)},\hat{y}^{(i)})=-\sum_{j=1}^qy_j^{(i)}\log\hat{y}_j^{(i)}
H(y(i),y^(i))=−j=1∑qyj(i)logy^j(i)
因为
y
(
i
)
y^{(i)}
y(i)里面的元素非0即1,假设
y
k
(
i
)
y_k^{(i)}
yk(i)为1,其余为0,则等式可以重新写为
H
(
y
(
i
)
,
y
^
(
i
)
)
=
−
log
y
^
k
(
i
)
H(y^{(i)},\hat{y}^{(i)})=-\log\hat{y}_k^{(i)}
H(y(i),y^(i))=−logy^k(i)
从这个等式就可以看出,交叉熵只考虑预测值最高的样本,预测值越大,交叉熵的值越小。
假设训练数据样本为
n
n
n,交叉熵损失函数定义为
l
(
Θ
)
=
1
n
∑
i
=
1
n
H
(
y
(
i
)
,
y
^
(
i
)
)
l(\Theta)=\frac{1}{n}\sum_{i=1}^nH(y^{(i)},\hat{y}^{(i)})
l(Θ)=n1i=1∑nH(y(i),y^(i))
对应代码
def cross_entropy(y_hat, y):
return - torch.log(y_hat.gather(1, y.view(-1, 1)))
在这里顺便记一下gether函数的用法:gather(dim,index),它是取值操作,dim表示按行取还是按列取,0表示按列取,1表示按行取。index表示取值的下标。
y_hat = torch.tensor([[0.1, 0.3, 0.6], [0.3, 0.2, 0.5]])
y = torch.LongTensor([0, 2])
y_hat.gather(1, y.view(-1, 1))
output:
tensor([[0.1000],
[0.5000]])
这里必须为y.view(-1, 1),如果改成y.view(1, -1)会报错。
对多维Tensor按维度操作
X = torch.tensor([[1, 2, 3], [4, 5, 6]])
print(X.sum(dim=0, keepdim=True)) # dim为0,按照相同的列求和,并在结果中保留列特征
print(X.sum(dim=1, keepdim=True)) # dim为1,按照相同的行求和,并在结果中保留行特征
print(X.sum(dim=0, keepdim=False)) # dim为0,按照相同的列求和,不在结果中保留列特征
print(X.sum(dim=1, keepdim=False)) # dim为1,按照相同的行求和,不在结果中保留行特征
output:
tensor([[5, 7, 9]])
tensor([[ 6],
[15]])
tensor([5, 7, 9])
tensor([ 6, 15])
其他函数
- iter()函数:生成了一个迭代器。
list_ = [1, 2, 3, 4, 5]
it = iter(list_)
for i in range(5):
line = next(it)
print("第%d 行, %s" %(i, line))
output:
第0 行, 1
第1 行, 2
第2 行, 3
第3 行, 4
第4 行, 5
第三课 多层感知机
多层感知机的基本介绍
课程讲解的十分详尽,这里就简记一下知识点。
下图展示了一个多层感知机的神经网络图,它含有一个隐藏层,该层中有5个隐藏单元。
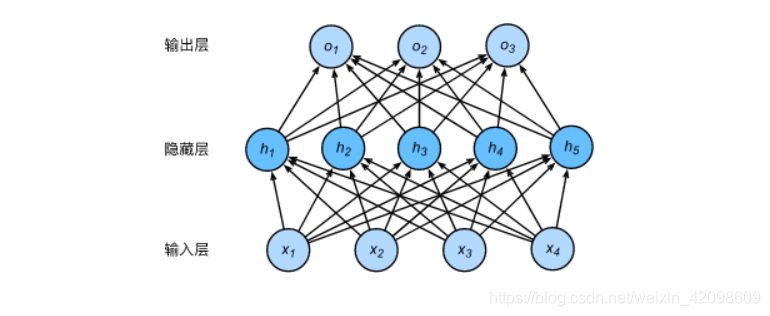
含单隐藏层的多层感知机,其输出
O
n
×
q
O^{n\times q}
On×q计算为(
n
n
n是批量大小,
q
q
q是输出类别数):
H
=
X
W
h
+
b
h
H=XW_h+b_h
H=XWh+bh
O = H W o + b o O=HW_o+b_o O=HWo+bo
联立起来得
O
=
(
X
W
h
+
b
h
)
W
o
+
b
o
=
X
W
h
W
o
+
b
h
W
o
+
b
o
O=(XW_h+b_h)W_o+b_o=XW_hW_o+b_hW_o+b_o
O=(XWh+bh)Wo+bo=XWhWo+bhWo+bo
不难看出,输出与输入特征仍为线性关系,事实上,即便再添加更多的隐藏层,以上设计依然只能与仅含输出层的单层神经网络等价。
激活函数
激活函数引入了非线性变换。
这里有三种激活函数:relu函数、sigmoid函数以及tanh函数。
relu函数:
R
e
L
U
(
x
)
=
m
a
x
(
x
,
0
)
ReLU(x) = max(x,0)
ReLU(x)=max(x,0)
sigmoid函数:
s
i
g
m
o
i
d
(
x
)
=
1
1
+
exp
(
−
x
)
sigmoid(x)=\frac{1}{1+\exp(-x)}
sigmoid(x)=1+exp(−x)1
由此可见,sigmoid函数取值在[0,1]之间。
sigmoid导数:
s
i
g
m
o
i
d
′
(
x
)
=
s
i
g
m
o
i
d
(
x
)
(
1
−
s
i
g
m
o
i
d
(
x
)
)
sigmoid'(x)=sigmoid(x)(1-sigmoid(x))
sigmoid′(x)=sigmoid(x)(1−sigmoid(x))
tanh函数:
t
a
n
h
(
x
)
=
1
−
exp
(
−
2
x
)
1
+
exp
(
−
2
x
)
=
2
1
+
exp
(
−
2
x
)
−
1
tanh(x)=\frac{1-\exp(-2x)}{1+\exp(-2x)}=\frac{2}{1+\exp(-2x)}-1
tanh(x)=1+exp(−2x)1−exp(−2x)=1+exp(−2x)2−1
由此可见,tanh函数取值在[-1,1]之间。
tanh函数导数:
t
a
n
h
′
(
x
)
=
1
−
t
a
n
h
2
(
x
)
tanh'(x)=1-tanh^2(x)
tanh′(x)=1−tanh2(x)
它是关于原点对称的。
关于激活函数的选择
ReLu函数是一个通用的激活函数,目前在大多数情况下使用。但是,ReLU函数只能在隐藏层中使用。
用于分类器时,sigmoid函数及其组合通常效果更好。由于梯度消失问题,有时要避免使用sigmoid和tanh函数(因为它们的梯度在[0,1]之间)。
在神经网络层数较多的时候,最好使用ReLu函数,ReLu函数比较简单计算量少,而sigmoid和tanh函数计算量大很多。
在选择激活函数的时候可以先选用ReLu函数如果效果不理想可以尝试其他激活函数。
多层感知机代码解读
多层感知机就是含有至少一个隐藏层的由全连接层组成的神经网络,且每个隐藏层的输出通过激活函数进行变换。
H
=
Φ
(
X
W
h
+
b
h
)
H=\Phi(XW_h+b_h)
H=Φ(XWh+bh)
O = H W o + b o O=HW_o+b_o O=HWo+bo
从零开始实现需自己定义网络
def net(X):
X = X.view((-1, num_inputs))
#隐藏层输出
H = relu(torch.matmul(X, W1) + b1)
return torch.matmul(H, W2) + b2
torch.matmul(tensor1,tensor2,out=None)
torch.mm(mat1,mat2,out=None)
二者之间的区别从输入参数上就可以看出。
利用PyTorch实现时
net = nn.Sequential(
# FlattenLayer是在数据输入前进行维度变换
d2l.FlattenLayer(),
nn.Linear(num_inputs, num_hiddens),
nn.ReLU(),
nn.Linear(num_hiddens, num_outputs),
)
其他函数
- detch()函数:简而言之就是将参数从网络中隔离开来,不再参与更新。一个简单的示例摘自慢行厚积:
import torch
a = torch.tensor([1, 2, 3.], requires_grad=True)
print(a.grad)
out = a.sigmoid()
print(out)
#添加detach(),c的requires_grad为False
c = out.detach()
print(c)
#这时候没有对c进行更改,所以并不会影响backward()
out.sum().backward()
print(a.grad)
output:
None
tensor([0.7311, 0.8808, 0.9526], grad_fn=<SigmoidBackward>)
tensor([0.7311, 0.8808, 0.9526])
tensor([0.1966, 0.1050, 0.0452])


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









