






 本文档详细介绍了如何在ROS系统中配置和使用Scanse Sweep激光雷达。首先,通过下载并安装FTD驱动来更新内核驱动模块,然后根据JestonHacks的视频教程安装SDK,并修改udev规则以连接设备。接着,为确保正确运行,赋予/dev/ttyUSB0文件777权限。最后,解决可能遇到的ROS节点启动问题,通过apt安装缺失的依赖并重新运行launch文件。
本文档详细介绍了如何在ROS系统中配置和使用Scanse Sweep激光雷达。首先,通过下载并安装FTD驱动来更新内核驱动模块,然后根据JestonHacks的视频教程安装SDK,并修改udev规则以连接设备。接着,为确保正确运行,赋予/dev/ttyUSB0文件777权限。最后,解决可能遇到的ROS节点启动问题,通过apt安装缺失的依赖并重新运行launch文件。
一.安装FTD驱动
- 点击链接进行下载——FTD驱动下载
- 下载好后将其解压并安装
tar xfvz libftd2xx-<platform>-1.x.x.tgz
cd release/build
#把解压出来的动态库复制到系统路径上
sudo cp lib* /usr/local/lib
#创建链接文件
ln -s /usr/local/lib/libftd2xx.so.1.x.x /usr/local/lib/libftd2xx.so
sudo chmod 0755 /usr/local/lib/libftd2xx.so.1.x.x
- 接下来我们要卸载内核的驱动模块。
sudo lsmod
#已经存在ftdi_sio就说明已经存在驱动模块,把他们卸载了
sudo rmmod ftdi_sio
sudo rmmod usbserial
- 编译下example
cd release/examples
make
cd EEPROM/read
#先把设备接上再运行,看看是否能识别
sudo ./read
#
二.安装Scanse Sweep LIDAR的软件
学习自JestonHacks的视频教程
https://www.jetsonhacks.com/2017/06/06/scanse-sweep-lidar-software-install/
1.先安装sdk
克隆仓库到本地
git clone https://github.com/jetsonhacks/installSweep
cd installSweep/
./installSweepSDK.sh
dmesg --follow
接下来拔掉USB再接上
把SerialNumber复制,并更改installSweep里的99-usb-serial.rules文件。将其SerialNumber填上。并复制到系统环境
sudo cp 99-usb-serial.rules /etc/udev/rules.d/
ls -l /dev/sweep
这就已经链接了

为了确保万无一失,把/dev/ttyUSB0 的权限改为777吧.
sudo chmod 0777 /dev/ttyUSB0
视频教程中的sdk的功能测试,这里不贴代码了

2.安装ROS的功能包
cd installSweep/
#./installSweepROS.sh [workspace name] 后面是你的工作空间,前提要先建好工作空间
./installSweepROS.sh ~/ros_catkin_ws
cd ~/ros_catkin_ws
source ./develop/setup.sh
接下来就可测试下
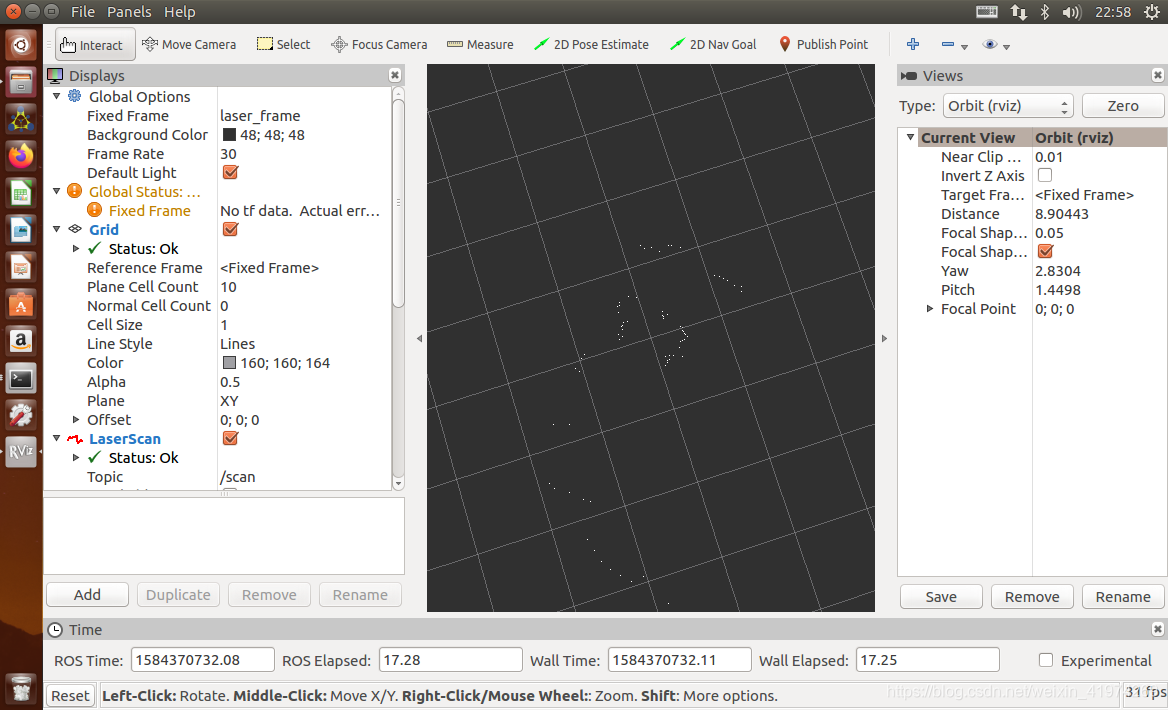
roslaunch sweep_ros view_sweep_laser_scan.launch
如果遇到错误
ERROR: cannot launch node of type [pointcloud_to_laserscan/pointcloud_to_laserscan_node]: pointcloud_to_laserscan
ROS path [0]=/opt/ros/kinetic/share/ros
ROS path [1]=/home/book/catkin_ws/src
ROS path [2]=/opt/ros/kinetic/share
就用apt工具安装一下
sudo apt install ros-kinetic-pointcloud-to-laserscan ros-kinetic-rosbridge-server
再重新运行下launch文件


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









