





 本文介绍了一种利用卷积特征映射生成区域提议的方法。通过增加两个额外的卷积层,将每个特征图位置编码为特征向量,并为每个位置输出对象性分数,然后回归k个区域提议的边界框。在每个滑动窗口位置产生k个提议,reg层产生4k个坐标,cls层产生2k个分数。使用三种不同的尺度和纵横比,k设定为9。总共有WHk个锚点。
本文介绍了一种利用卷积特征映射生成区域提议的方法。通过增加两个额外的卷积层,将每个特征图位置编码为特征向量,并为每个位置输出对象性分数,然后回归k个区域提议的边界框。在每个滑动窗口位置产生k个提议,reg层产生4k个坐标,cls层产生2k个分数。使用三种不同的尺度和纵横比,k设定为9。总共有WHk个锚点。
1.Introduction
我们基于一个ideao : convolutional feature maps can also be used for generating region proposals.所以在此基础上,我们增加了两个额外的conv layers : 1)encode eacher map position into a short feature vector.(把每一个feature map的位置都encode成一个短的特征向量) 2)在每一个feature map的position上都输出一个objectness score,然后再为k个region proposals去回归边界。
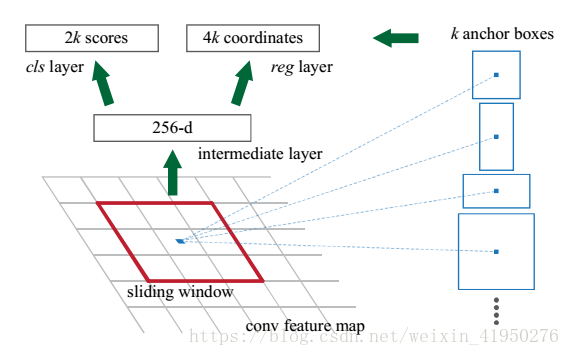
在每一个sliding-window 的位置都会同时产生k个region proposals,所以在reg layer就会有4k个对应于k个boxs的坐标。cls layer会产生2k个scores计算每一个proposal的object/not-object的概率。每一个anchor都是在sliding window的中心,都和scale和纵横比有关。在这篇paper中我们用三个不同的scales和aspect ratio,所以k=9 at each sliding position。如果一个feature map的size是WxH那么总共会产生WHk个anchors
loss-function:



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









