







 超级会员免费看
超级会员免费看
 本文详细介绍了ROS中的Actionlib库在长时间任务中的应用,以及如何在非ROS系统中通过rosbridge与ROS进行通信。内容包括Actionlib的功能、非ROS系统中的实现步骤、HTML前端代码撰写和Actionlib服务器端的理解,特别是关于feedback、goal和result的概念解释。
本文详细介绍了ROS中的Actionlib库在长时间任务中的应用,以及如何在非ROS系统中通过rosbridge与ROS进行通信。内容包括Actionlib的功能、非ROS系统中的实现步骤、HTML前端代码撰写和Actionlib服务器端的理解,特别是关于feedback、goal和result的概念解释。
目录
一、actionlib是做什么的?
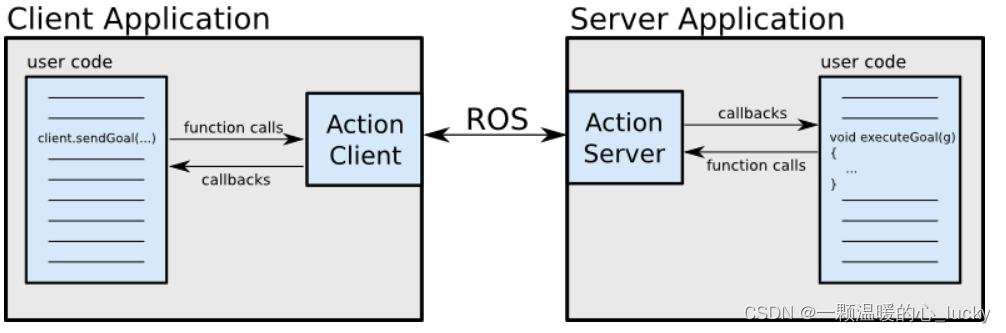
Actionlib是ROS非常重要的库,像执行各种运动的动作,例如控制手臂去抓取一个杯子,这个过程可能复杂而漫长,执行过程中还可能强制中断或反馈信息,Actionlib就是非常适合类似这种运动控制通信了。
在任何一个比较大的基于ROS的系统,都会有这样的情况,向某个节点发送请求执行某一个任务,并返回相应的执行结果,这种通常用ROS的服务(services)完成。然而,有一些情况服务执行的时间很长,在执行中想要获得任务处理的进度,或可能取消执行任务,Actionlib就能实现这样的功能,它是ROS的一个非常重要的库。可以实现一些简单的状态机功能,算的上是SMACH的一个弱化版。
 二、如何
二、如何
 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











