



















献给所有飘在异乡的“我们”!
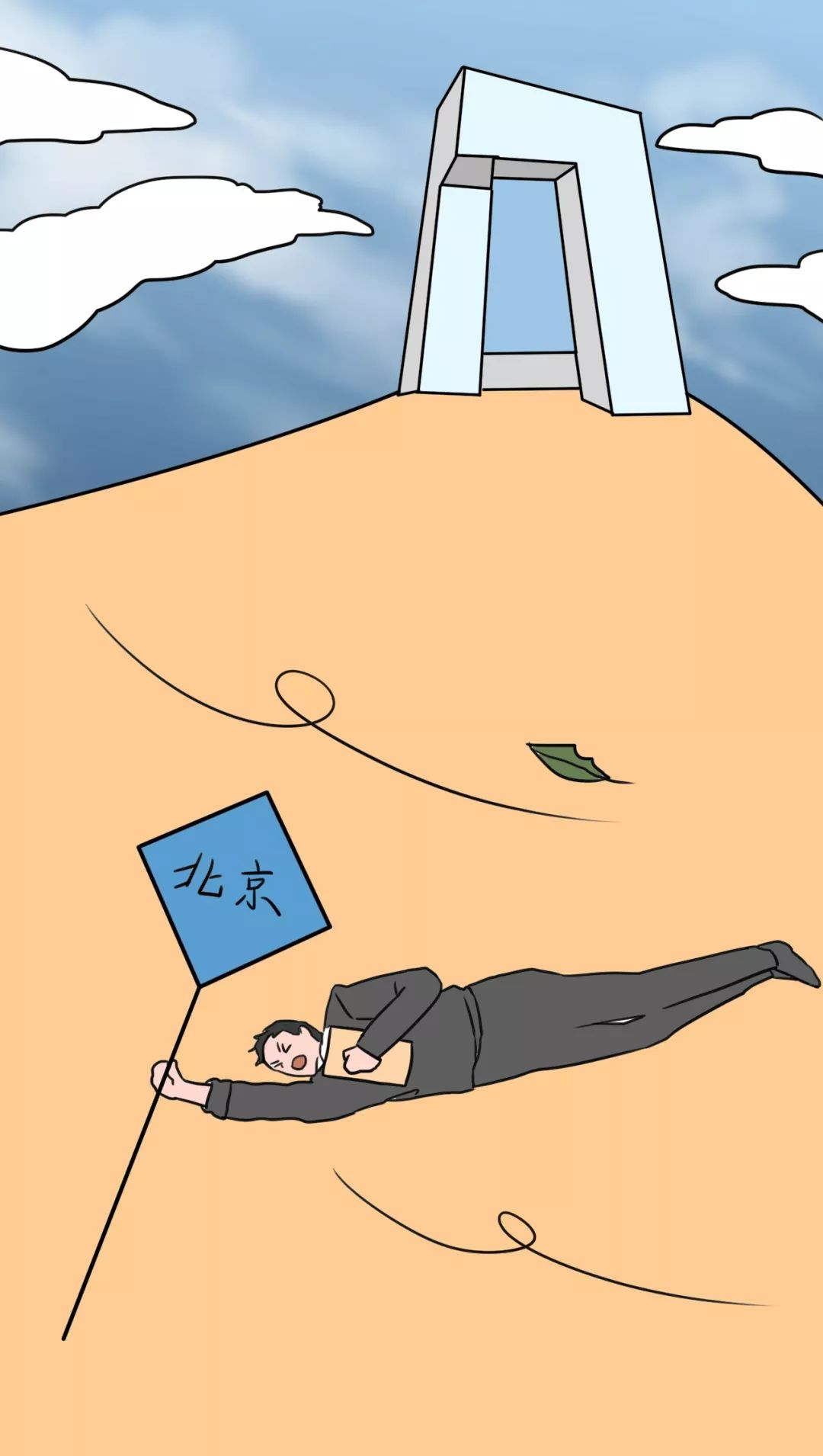
在我离开北京的时候,我还依稀记得,十年前我对朋友说过的那句话:我一定要留在北京,因为那里有梦想。
有时候我甚至想对着北京喊一句:去 TM 的北京,去 TM 的奋斗,去 TM 的梦想,我只想安静的生活!和我的爱人,和我的亲人,还有我那逝去的母亲!
北漂十年,有得有失。
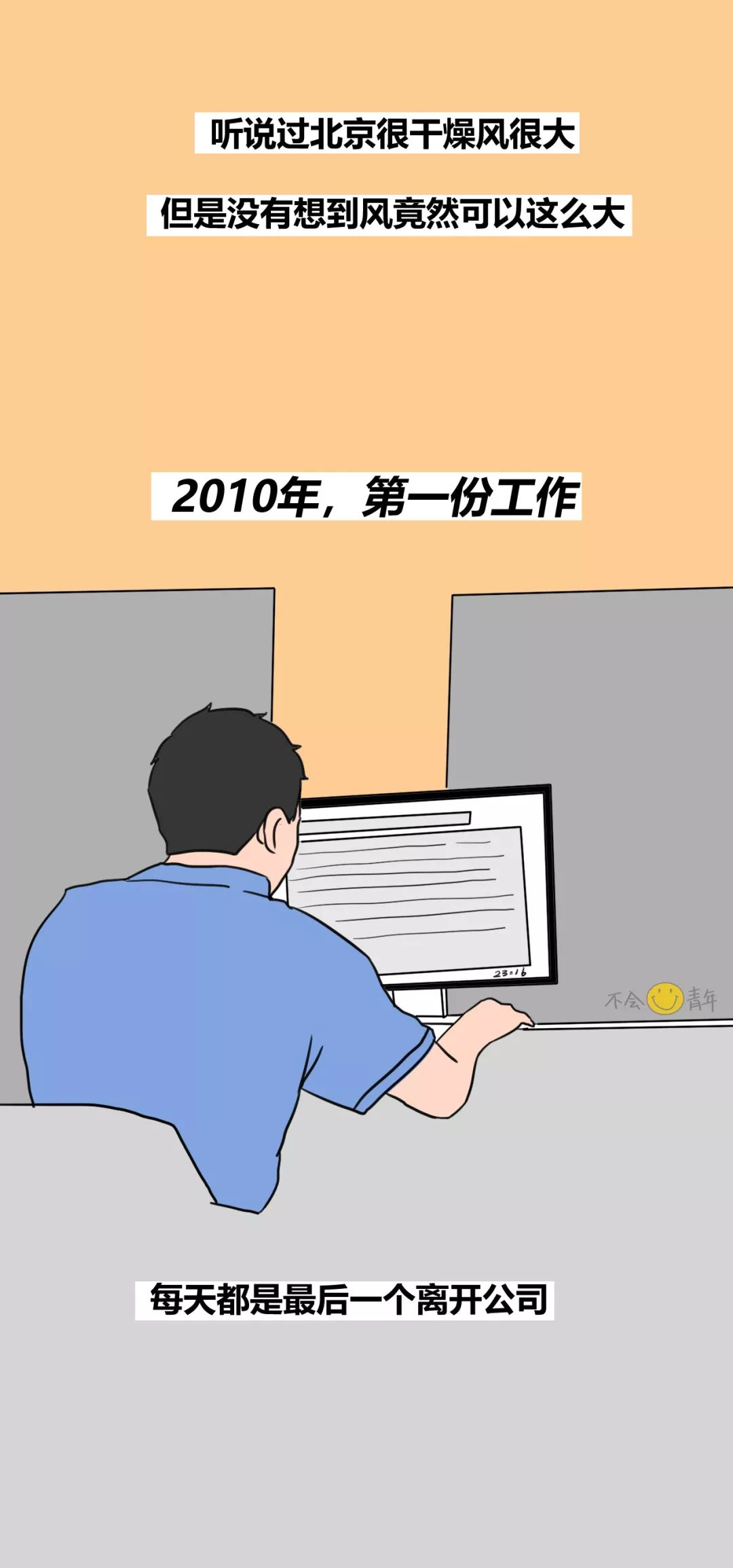
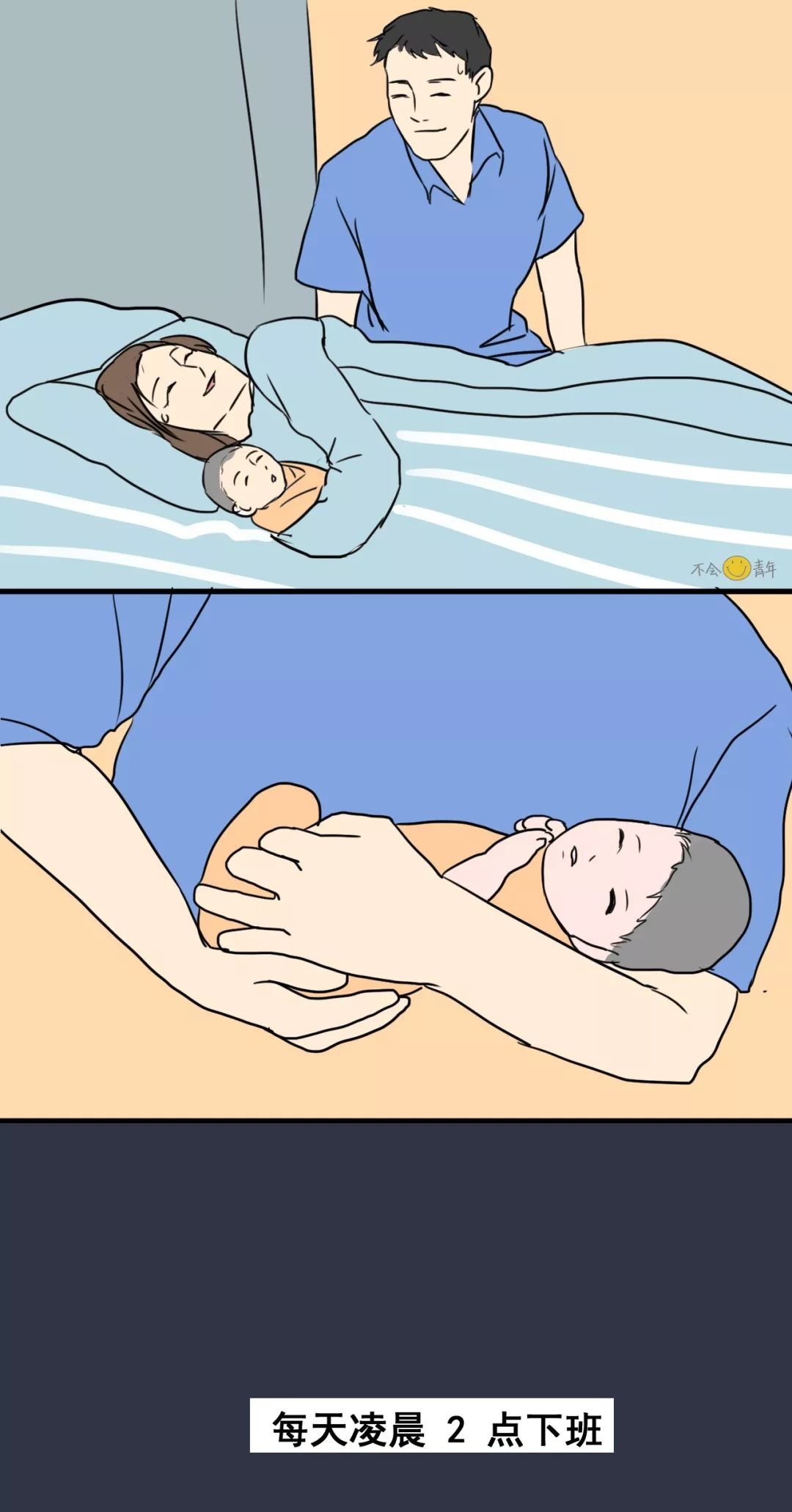
工资一年比一年多,住房一年比一年好,职位一年比一年高,而我眼睛里的光却一年不如一年。
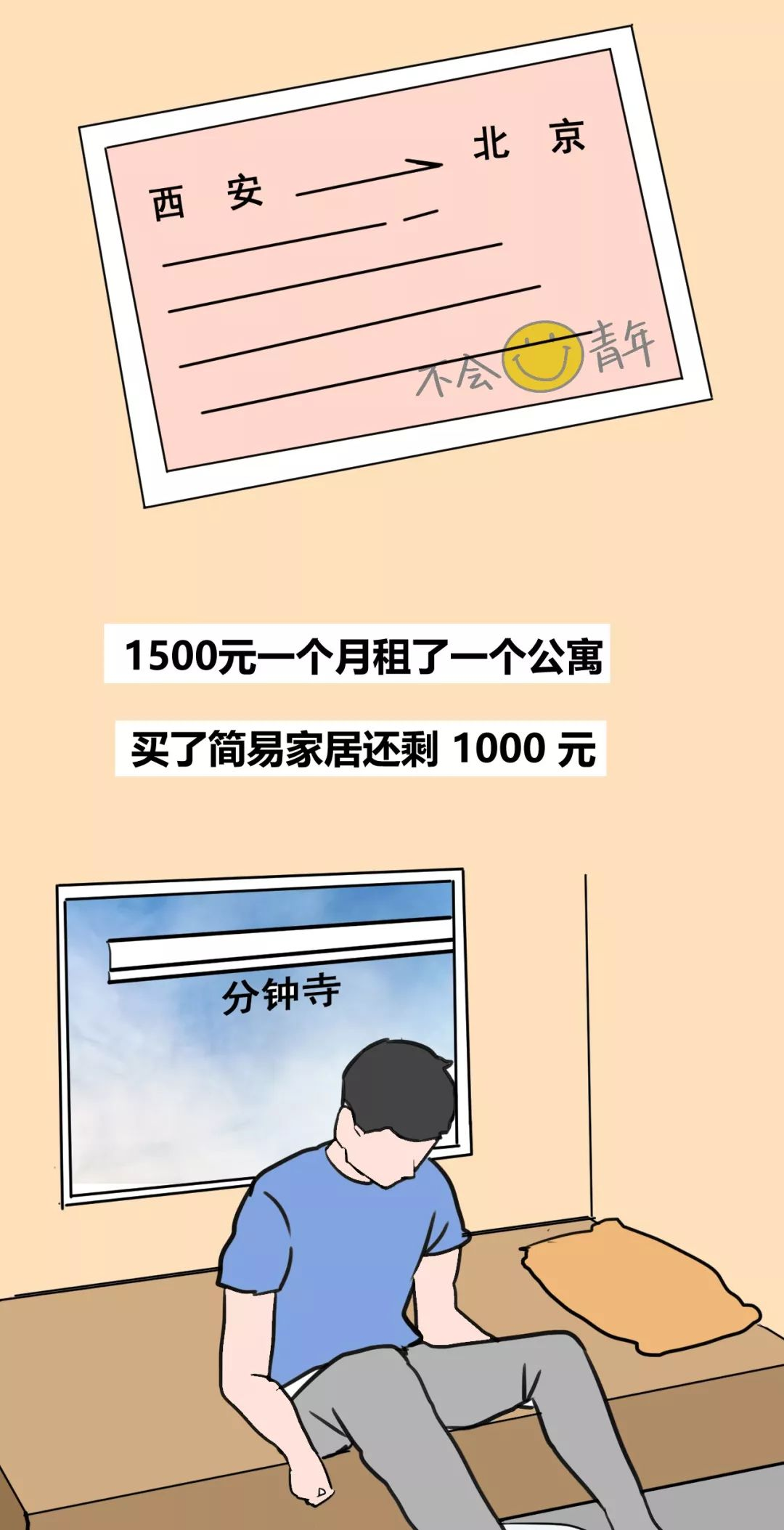
我还记得刚来北京时带着的那 3000 块钱,还记得那个时候的激情和梦想,就犹如地铁中拥拥挤挤的年轻人一样,对未来充满了希望和幻想.....
现在我“清空所有”的离开,选择到另外一个城市重新开始。我来得不够潇洒,走亦不够断然,但十年前的我和十年后的我一样,依然选择了内心自己最真实的想法。
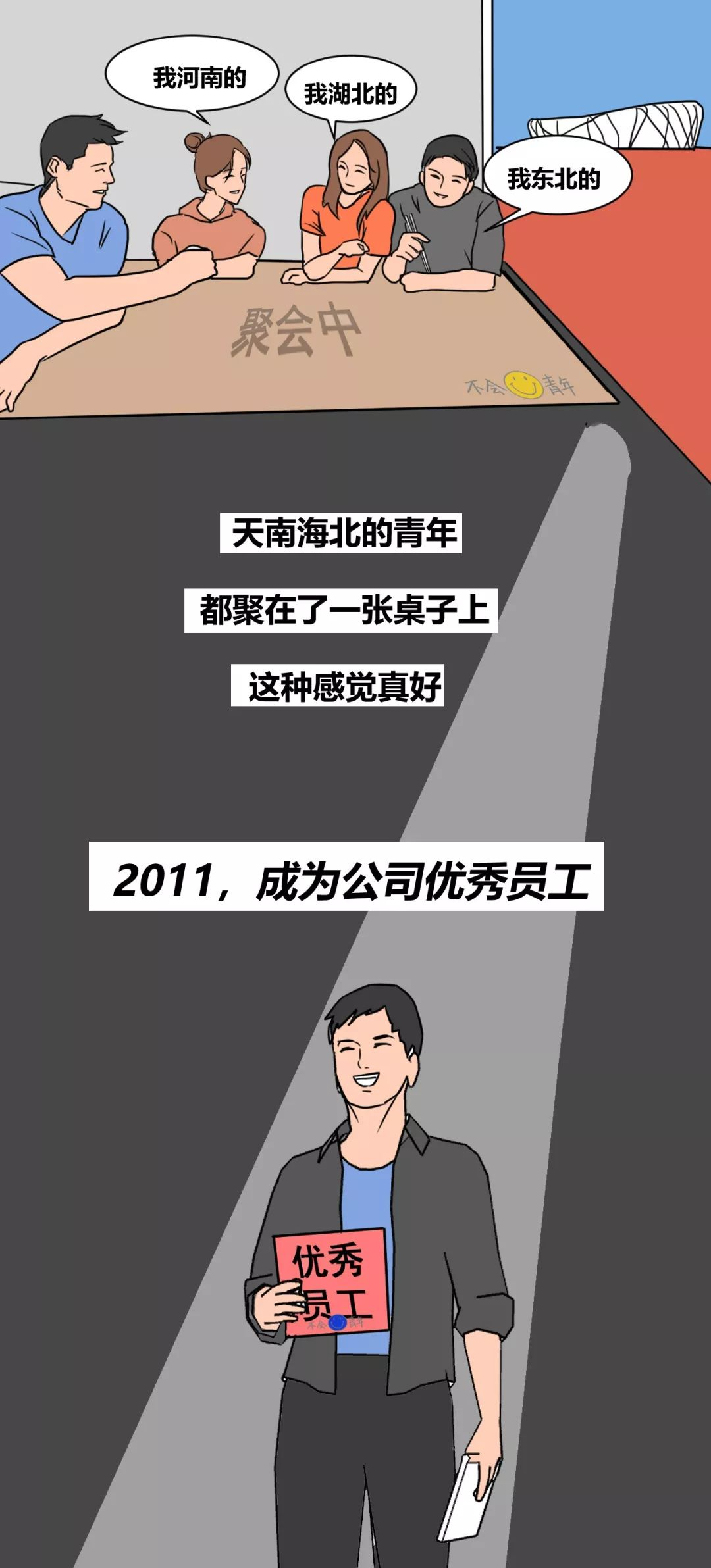
北京是一座非常年轻又有活力的城市,高峰时期乘坐地铁时,你会发现十年过去了,北京地铁的年轻人仍然是那么的年轻,就好像这座城市没有变老一样,但“我们”却变“老”了。
每个选择北漂的人都有自己的梦,每个选择回家的人都有自己的挂念,选择本身没有什么对与错,也没有什么成功与失败,那只是我们对生活方式的一种选择而已。
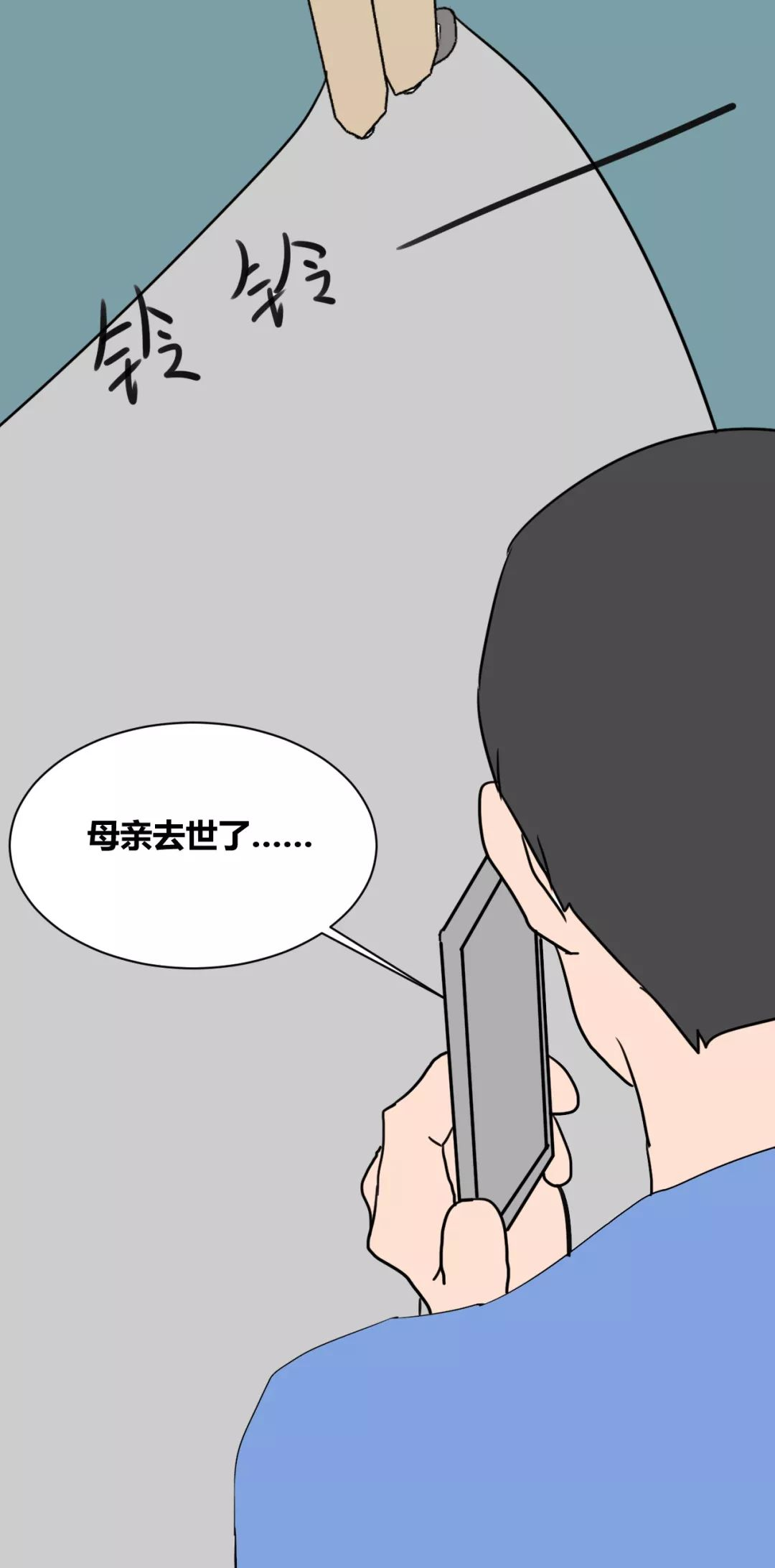
请一定珍惜我们身边的亲人!也许一次不经意的告别,就变成了永别。
最后,让我毅然我决定离开北京,其实还有一个重要原因,就是曾经的老领导意味深长的对我说过的一段话,这段话彻底让我下定决心离开北京。公号内回复:北京,可查看。
本文原创公众号:不会笑青年,授权转载请联系微信(laughyouth369)
< END >

















 1604
1604

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









