




 本文介绍了SLAM中常用的位姿表示方法,包括变换矩阵、四元数、旋转向量、欧拉角、李代数等,并详细阐述了它们之间的转换方法。
本文介绍了SLAM中常用的位姿表示方法,包括变换矩阵、四元数、旋转向量、欧拉角、李代数等,并详细阐述了它们之间的转换方法。
SLAM总结(二)-数学基础之位姿表示
注:查阅了很多资料,因为时间有限,可能整理的不是很准确,先发出来,希望有大佬看了能指正一下,后期也会根据对算法的回顾,回过头来不断修正。
1.位姿的不同表达方式:位姿的表达方式是表达2个坐标系之间相对关系的数学方法,由旋转和位移组成。SLAM中一般有每帧传感器帧坐标系在世界坐标(世界坐标系的重要作用是提供一个统一的参考,坐标系的原点及姿态如何并不是特别重要,根据实际选定即可,如SLAM中原点一般以初始化成功的地方,可能在空间的任何地方)下的位姿Twc(待求状态变量)、两传感器帧之间的相对位姿。这里统一使用右手坐标系,表达方式如下:
1)变换矩阵,可以表示旋转和平移
旋转(姿态)R用3x3的正交矩阵(旋转矩阵)表示,具有3个自由度。位移t用3x1的列向量表示。为了简化计算通常将两者组合成(欧式)变换矩阵T,最后一列为4x1的齐次坐标,如下式所示。
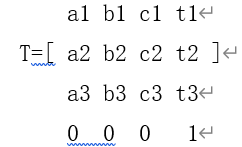
常见坐标表示TWC,Tcw(从左往右,从上到下)都表示从(from)C坐标系到(to)W坐标系的变换,以W作为参考坐标系,a、b、c分别是C的x、y、z轴在W中的向量,t是C的坐标原点在W的位置。对于相似变换S_WC中,sR为w坐标系下的非单位正交向量,t为c坐标系原点在w坐标系的坐标,尺度与w坐标系(参考坐标系)一样。
注:正交矩阵的性质
a)行向量、列向量的模都为1。
b)行向量、列向量两两相互正交,即点积(内积)为0
c)矩阵的转置等于矩阵的逆,即UTU=U-1U=I
d)正交矩阵相乘结果仍是正交矩阵,构成群
e)保范性:正交矩阵乘个向量,即(Ux)T(Ux) = xTUTUx = xTx
f)正交矩阵的特征值只能是1或-1
2)四元数:只能表示旋转,q=q_Rb表示R绕旋转轴u旋转θ角与b系重合
单位四元数q表示旋转,其形式为q=[q0,q1,q2,q3]T。q1,q2,q3为虚部,q0为实部。其约束是四
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









