




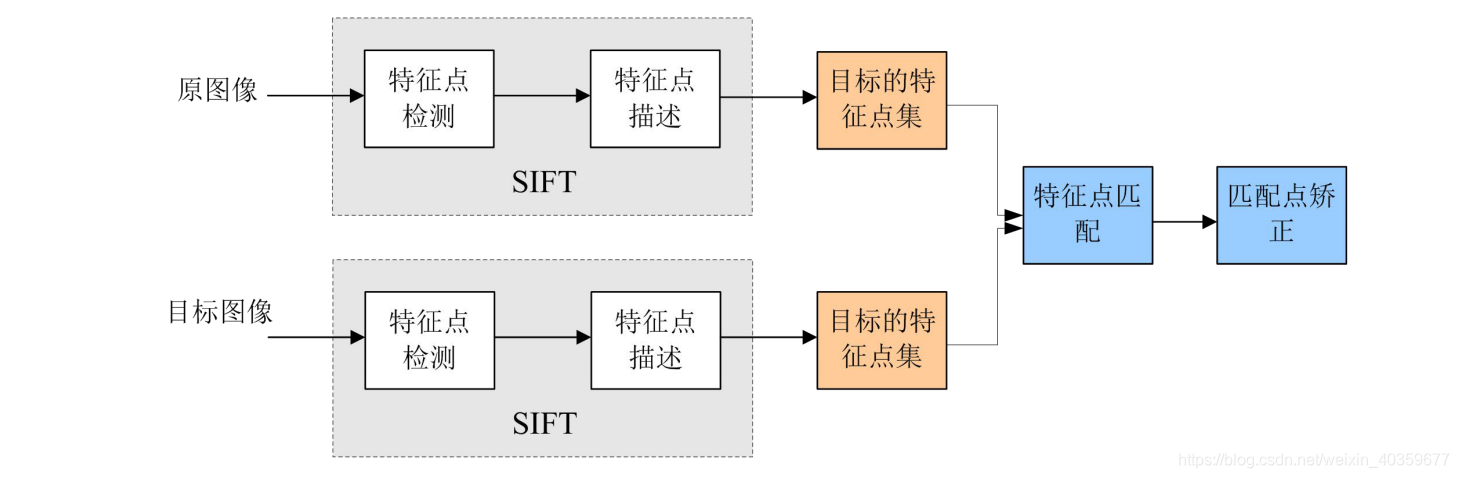
 本文深入探讨SIFT算法,包括其尺度不变性、关键点检测、方向匹配和描述子构建。通过与Harris特征的匹配实验对比,展示了SIFT在图像处理中的优势,如对尺度变化、旋转的不变性。同时,文章还提及在实际操作中遇到的环境配置和编程问题及其解决方案。
本文深入探讨SIFT算法,包括其尺度不变性、关键点检测、方向匹配和描述子构建。通过与Harris特征的匹配实验对比,展示了SIFT在图像处理中的优势,如对尺度变化、旋转的不变性。同时,文章还提及在实际操作中遇到的环境配置和编程问题及其解决方案。
一、SIFT算法原理概述
1、SIFT算法概述
尺度不变特征转换即SIFT (Scale-invariant feature transform)是一种计算机视觉的算法。它用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量,此算法由 David Lowe在1999年所发表,2004年完善总结。 其应用范围包含物体辨识、机器人地图感知与导航、影像缝合、3D模型建立、手势辨识、影像追踪和动作比对。SIFT算法的实质是在不同的尺度空间上查找关键点(特征点),并计算出关键点的方向。SIFT所查找到的关键点是一些十分突出,不会因光照,仿射变换和噪音等因素而变化的点,如角点、边缘点、暗区的亮点及亮区的暗点等。
SIFT算法的实质可以归为在不同尺度空间上查找特征点(关键点)的问题。
2、SIFT算法步骤
2.1、关键点检测
搜索所有尺度上的图像位置。通过高斯微分函数来识别潜在的对于尺度和旋转不变的兴趣点。在每个候选的位置上,通过一个拟合精细的模型来确定位置和尺度。关键点的选择依据于它们的稳定程度。
2.1.1、尺度空间极值检测
尺度空间理论的基本思想是:在图像信息处理模型中引入一个被视为尺度的参数,通过连续变化尺度参数获得多尺度下的尺度空间表示序列,对这些序列进行尺度空间主轮廓的提取,并以该主轮廓作为一种特征向量,实现边缘、角点检测和不同分辨率上的特征提取等。
尺度空间在实现时使用高斯金字塔表示
高斯金字塔的构建分为两部分:
1. 对图像做不同尺度的高斯模糊;
2. 对图像做降采样(隔点采样)。
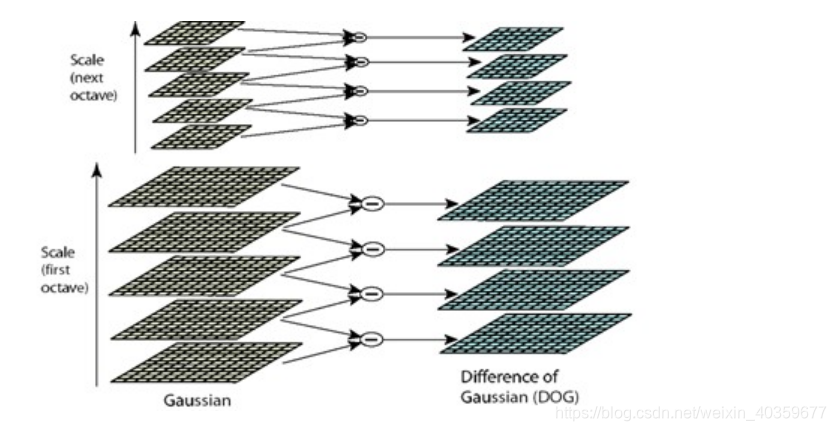
2.1.1、DOG局部极值检测
特征点是由DOG空间的局部极值点组成的。为了寻找DoG函数的极值点,每一个像素点要和它所有的相邻点比较,看其是否比它的图像域和尺度域
的相邻点大或者小中间的检测点和它同尺度的8个相邻点和上下相邻尺度对应的9×2个点共26个点比较,以确保在尺度空间和二维图像空间都检测到极值点。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1241
1241

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









