




大部分搬运:http://www.cnblogs.com/ronny/p/4009425.html
一、理论知识
Harris角点是在1981的Moravec的角点理论的基础上再1988由Harris提出的。因此,先说明Moravec的角点理论。Moravec角点说明的从方向(1,0),(0,1),(1,1),(-1,1)四个方向出发的像素的变化值,它有三种情况:
(1)如果图像是什么平坦的,那么像素的变化不大。
(2)如果图像是一条边,那么在沿这条边滑动时像素变化不大,而在沿垂直于这条边的方向滑动时,像素的变化会很大。
(3) 如果图像是一个角点时,任何方向移动像素的值都会发生很大变化。
由于这个角点的判断只通过4个方向来说明,对方向的依赖性太强,因此,Harris考虑从各个方向出发来优化它。各个方向的话就需要引进微分的思想。在Moravec中判别的公式为
![]()
也就是在4个方向的像素差的平方和(还要乘以权值w)。那么在Harris角点中需要将4个方向变成各个方向。
I(u+Δx,v+Δy)=I(u,v)+I x (u,v)Δx+I y (u,v)Δy+O(Δx 2 ,Δy 2 )≈I(u,v)+I x (u,v)Δx+I y (u,v)Δy+ I(u+Δx,v+Δy)=I(u,v)+Ix(u,v)Δx+Iy(u,v)Δy+O(Δx2,Δy2)≈I(u,v)+Ix(u,v)Δx+Iy(u,v)Δy
自相关函数为:![]()
其中:
也就是说图像I(x,y) 在点(x,y) 处平移(Δx,Δy) 后的自相关函数可以近似为二项函数:
![]()
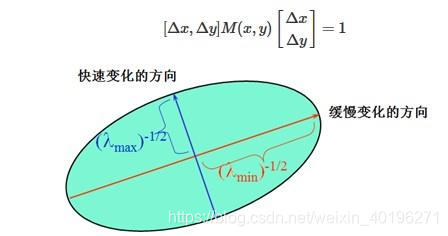
![]()
椭圆的扁率和尺寸是由M(x,y) 的特征值λ 1 、λ 2 决定的,椭圆的方向是由M(x,y) 的特征矢量决定的,如下图所示,椭圆方程为:
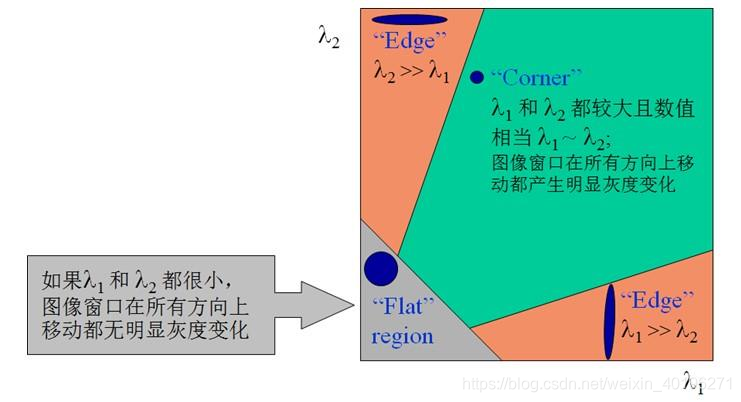
椭圆函数特征值与图像中的角点、直线(边缘)和平面之间的关系如下图所示。共可分为三种情况:
- 图像中的直线。一个特征值大,另一个特征值小,λ 1 ≫λ 2或λ 2 ≫λ 1 。自相关函数值在某一方向上大,在其他方向上小。
- 图像中的平面。两个特征值都小,且近似相等;自相关函数数值在各个方向上都小。
- 图像中的角点。两个特征值都大,且近似相等,自相关函数在所有方向都增大。
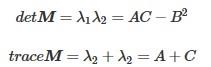
根据二次项函数特征值的计算公式,我们可以求M(x,y) 矩阵的特征值。但是Harris给出的角点差别方法并不需要计算具体的特征值,而是计算一个角点响应值R 来判断角点。R 的计算公式为:
![]()
式中,detM为矩阵M=[AB BC ] 的行列式;traceM 为矩阵M 的直迹;α 为经常常数,取值范围为0.04~0.06。事实上,特征是隐含在detM 和traceM 中,因为,
二、算法步骤
1. 计算图像I(x,y) 在X 和Y 两个方向的梯度I x 、I y 。
![]()
2. 计算图像两个方向梯度的乘积。
![]()
3.使用高斯函数对I 2 x 、I 2 y 和 Ixy 进行高斯加权(取σ=1 ),生成矩阵M 的元素A、B 和C 。
![]()
4.计算每个像素的Harris响应值R ,并对小于某一阈值 t 的 R 置为零。
![]()
5. 在3×3 或5×5 的邻域内进行非最大值抑制,局部最大值点即为图像中的角点。
三、Harris性质
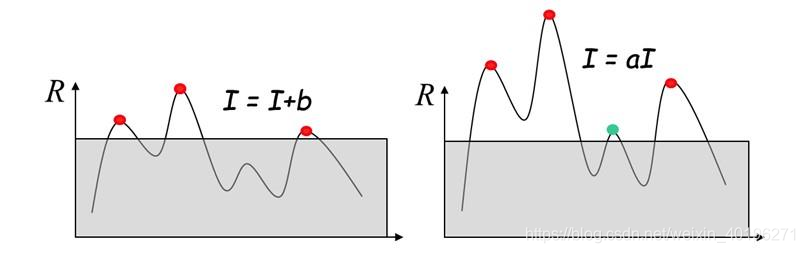
Harris角点检测算子对亮度和对比度的变化不敏感
这是因为在进行Harris角点检测时,使用了微分算子对图像进行微分运算,而微分运算对图像密度的拉升或收缩和对亮度的抬高或下降不敏感。换言之,对亮度和对比度的仿射变换并不改变Harris响应的极值点出现的位置,但是,由于阈值的选择,可能会影响角点检测的数量。
Harris角点检测算子具有旋转不变性
Harris角点检测算子使用的是角点附近的区域灰度二阶矩矩阵。而二阶矩矩阵可以表示成一个椭圆,椭圆的长短轴正是二阶矩矩阵特征值平方根的倒数。当特征椭圆转动时,特征值并不发生变化,所以判断角点响应值R R 也不发生变化,由此说明Harris角点检测算子具有旋转不变性。
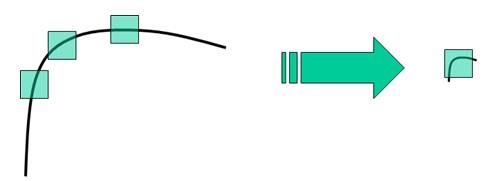
Harris角点检测算子不具有尺度不变性
如下图所示,当右图被缩小时,在检测窗口尺寸不变的前提下,在窗口内所包含图像的内容是完全不同的。左侧的图像可能被检测为边缘或曲线,而右侧的图像则可能被检测为一个角点。
四、多尺度Harris
由于Harris角点不具有尺度不变性,所以要想办法对它进行优化。
未完待续。。。。。。。。

















 14万+
14万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









