



5月31日消息,MIT科研人员开发了一款低成本体感手套:可扩展的触觉手套(STAG),这款手套采用针织材料,手掌部位分布了550个微型传感器,可识别人手与物体交互时产生的各种压力信息,然后科研人员用这些信息来训练卷曲神经网络识别并分类物体的触觉,并单纯通过触感来估测物体的重量。
据青亭网了解,尽管是一款体感手套,STAG并不提供体感反馈,只是为了尽可能捕捉人手的触感,而捕捉到的信息可用来帮助机器人识别并操控物体,甚至还可应用在假肢的设计上。
在于《自然杂志》中发表的论文中,MIT科研人员描述了一个利用STAG编辑的数据集,其中包含26种常见物体的信息,包括汽水罐、剪刀、网球、勺子、笔和马克杯。利用这个数据集,MIT科研人员研发的卷曲神经网络的预测准确率达76%(没有结合视觉数据),而且还能准确预测60克以内大多数物体的重量。
MIT科研人员表示:目前市面上相似的体感手套造价高达数千美金,却只配备约50个传感器,能捕捉到的信息也不够多。而STAG不仅能识别高精准度的数据,还采用市场现有的材料,成本可控制在10美元左右。
将STAG的传感系统与传统计算机视觉和图片数据集结合,机器人便能以更人性的方式理解与物体的交互。此外,STAG系统还可与机器人关节部分的传感器结合,优化对扭矩和轴向力的测量,更好地预测物体的重量。
除了识别物体的触感,STAG还能用于研究人手抓取物体的方式,为假肢定制更自然的体感反馈。在AR/VR领域,这项技术可用于优化体感反馈装置,模拟更逼真的触觉。
STAG传感器原理
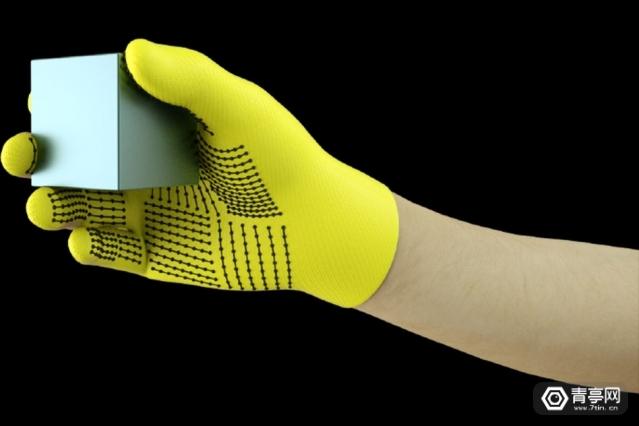
这些低成本的550个微型传感器是怎么实现的呢?原来,科研人员在STAG手套上加入了一层导电聚合物涂层,它可以根据外部压力改变阻力。科研人员将导电材质的线通过导电聚合物涂层中的孔从手指一直缝到手腕。这些线与涂层重叠后,便可实现压力传感器的效果。戴手套的人在触摸、抬起、握住、扔掉物体的时候,传感器能够记录每一个点感受到的压力。
这些线将手套与外部电路相连,并将压力数据转化成触觉分布图,也就是在一只虚拟手上增长、缩小的动态点。这些点的位置代表了受力点,而点的大小代表了力量强度。
通过这些分布图,MIT科研人员整合了一个包含13.5万帧视频图像的数据集,这些数据来自于之前说过的26个物体。这些视频帧可帮助神经网路估测物体和它的重量,并且模拟人手触觉。


















 31
31

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









