



前言
在水面点对点导航规划中,通常用GPS和惯导进行导航,这里我主要是通过建立简化模型,分析惯导航偏航角,GPS动态精度对导航的影响,需要注意的是以下推导使用的位置信息只是单纯GPS信息,没有和惯导做数据的位置借解算融合。
1. 惯导偏航角误差对导航的影响
1.1 惯导航向误差
点对点路径规划中,在判断是否到达目标点时,通常做法会设定一个阈值,当进入以该阈值为半径的圆内,即可认为到达该目标点,我们要回答该阈值如何设定的问题,以下分析为当惯性导航航向存在误差时,对该阈值取值的影响,需要注意的是通常航行误差由两部分误差引起:
1.惯导器件本身的误差,主要是陀螺仪的飘移,像中等精度的光纤惯导航向飘移大约为0.05°/h。
2.控制系统中的定航误差,由于定向过程中通常存在收敛或者震荡的过程,可假设为高斯噪声。
1.2 分析过程
详细分析如下:
设在东北(天)坐标系下,AUV需要从坐标
优化的目标函数为:
因为我们要求得在惯导存在航向误差时,点对点之间导航时阈值的选取,即阈值的最小值,所以可以转化为求最小值的问题。
上式可以看作非线性优化问题,求得其解析解还是比较麻烦的一件事,下面从另外一种思路来分析。
如下图所示:
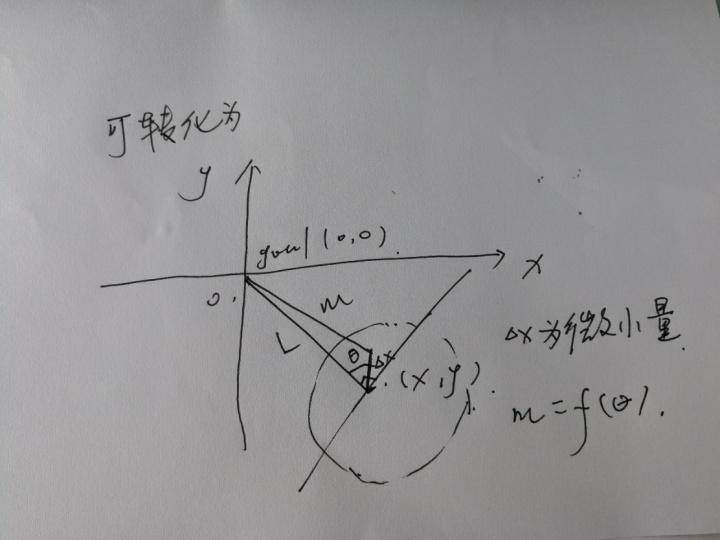
即
因为
1.
2.
1.3 仿真结果分析
图1.2仿真了不同偏航角误差对导航轨迹的影响。不同的导航轨迹中偏差角误差为5°-85°,间隔为5°,可以看到偏航角误差只是影响收敛的快慢,理论上在小于90°时都是收敛的,和上面的理论分析是一致的。
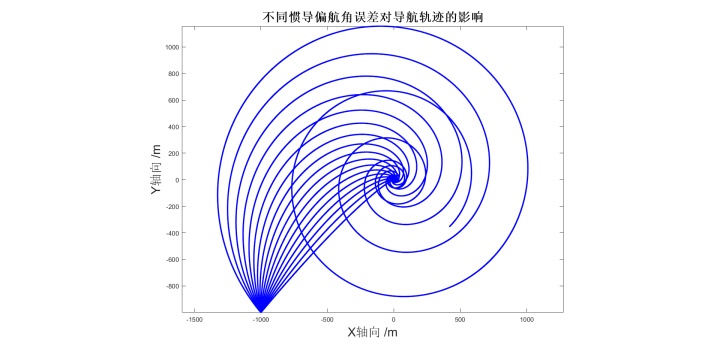
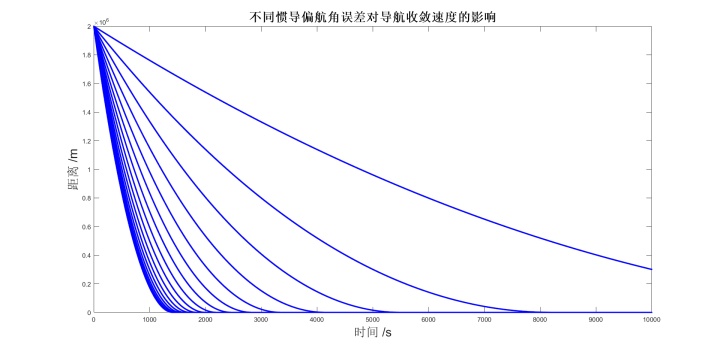
对收敛速度的影响如图1.3所示,可以看到当偏航角误差越大时,收敛速度也越慢,和上述的理论分析一致。
2. GPS动态精度对导航的影响
2.1 分析过程
分析过程和上面类似,所以不再采用建立解析方程的方法,而是在1中的仿真程序中做些修改,从而得出结论。
2.2 分析过程
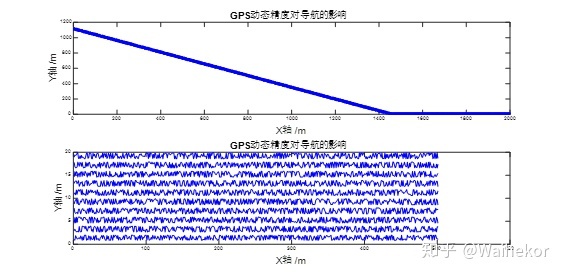
首先设置GPS的动态偏差为定常数,当设置为
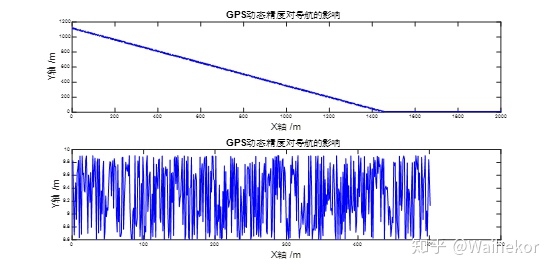
从图1.4中可以看到,距离目标点的收敛点最大不超过10m,即不超过GPS的动态精度。图1.5中显示的是不同GPS动态精度对导航的影响,GPS动态精度的范围为2m-20m,变化间隔为2m,可以看出不用GPS动态精度不影响最终收敛的时间,只影响最终的收敛点,最后的收敛点即为GPS动态精度。
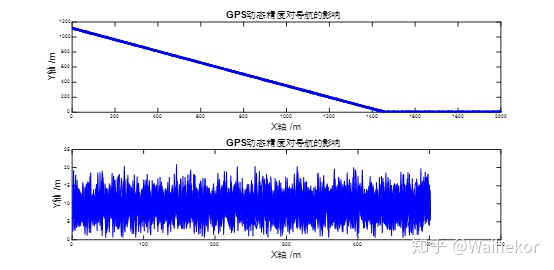
实际情况下GPS的动态精度可以看作是满足高斯噪声的,这点在实际数据的分析中可以得到。当高斯噪声的均值为10m,标准差为4m时,仿真结果如图1.6所示。
为了保证系统的稳定性,在实际取值时可以参考高斯分布中的原则,当设置为时,在第一次检测到进入目标点阈值圈中时,有99.76%的概率程序检测成功,当设置为2时,有95.44%的概率,并且在实际中,即使第一次检测不成功也没有关系,程序会不断检测,直至收敛。
这里我们设在时间
所以,该概率和时间呈指数关系,想在短时间内收敛,阈值可以设置的很小,可以根据实际情况灵活取值。
2.3 GPS位置动态精度分析
GPS经纬度动态精度的分析图如图1.7所示,包含50000条数据,GPS读取速率为1Hz,所以经过的时间为13.8小时,历经的时间较长,数据的可信度较高。
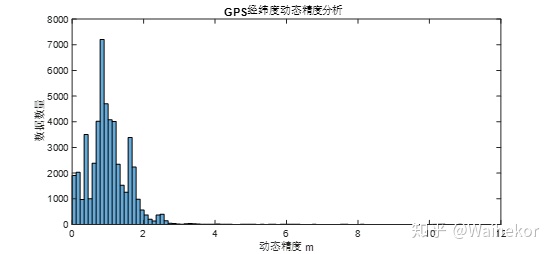
从图中可以看到,GPS经纬度动态精度可以大致看作高斯分布,从工程角度出发,基于
从结果可以看出,该GPS的动态位置精度还是比较高的,根据相关理论分析,GPS的静态位置精度高于动态位置精度。


















 872
872

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









