






 本文详细介绍了如何在博图V15中使用西门子S7-1200的时钟功能指令,包括读取和设置系统/本地时钟、设置时区以及运行时间计数器的操作。通过实例展示了编程步骤,并提到了夏令时切换时的注意事项。
本文详细介绍了如何在博图V15中使用西门子S7-1200的时钟功能指令,包括读取和设置系统/本地时钟、设置时区以及运行时间计数器的操作。通过实例展示了编程步骤,并提到了夏令时切换时的注意事项。
时钟功能指令的使用
在TIA 软件中,可以通过相应的时钟功能指令去实现对S7-1200 CPU的系统/本地时钟的操作。
- 读取S7-1200CPU的系统/本地时钟。
- 设置S7-1200CPU的系统/本地时钟。
- 设置S7-1200CPU的时区。
- 设置、启动、停止和读取S7-1200CPU 的 32 位运行小时计数器。
本文将详细介绍上述各个指令的使用。
系统/本地时间区别
系统时间(System Time):格林威治标准时间。
本地时间(Local Time):根据S7-1200CPU所处时区设置的本地标准时间。
读取S7-1200CPU的系统/本地时钟
1. 读取S7-1200CPU的系统/本地时钟指令的调用。

图1. 调用读取系统/本地时间指令
2.读取S7-1200CPU的系统/本地时钟指令的使用。
在DB块中创建数据类型为DTL(时间和日期)的变量。
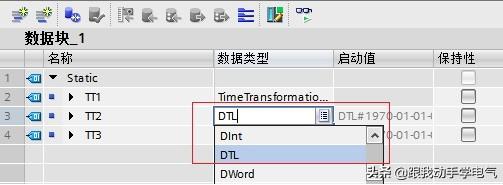
图2. 在数据块中创建DTL变量。
在OB1中编程,读出的系统/本地时间通过输出管脚“OUT”放入数据块相应的变量中。

图3. 编程读出系统/本地时间。
从上图可以看出,读出的系统时间和本地时间相差8小时,这是因为S7-1200CPU所设置的时区与格林威治时间相差8小时。
输出管脚“RET_VAL”为指令状态输出,具体含义参见指令帮助。
设置S7-1200CPU的系统/本地时钟
1.设置S7-1200CPU的系统/本地时钟指令的调用。

图4. 调用设置系统/本地时间指令
2.设置S7-1200CPU的系统/本地时钟指令的使用。
在DB块中创建数据类型为DTL(时间和日期)的变量。
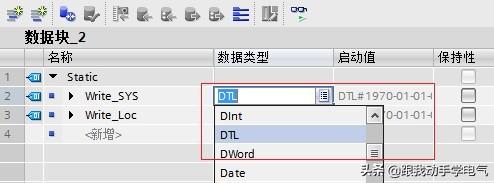
图5. 在数据块中创建DTL变量。
通过触摸屏或者强制变量的方式给DTL变量写入所想要设置的时间日期数值。
在OB1中编程,将DTL变量填写在输入管脚“IN”(设置系统时间指令)/“LOCTIME”(设置本地时间指令)。
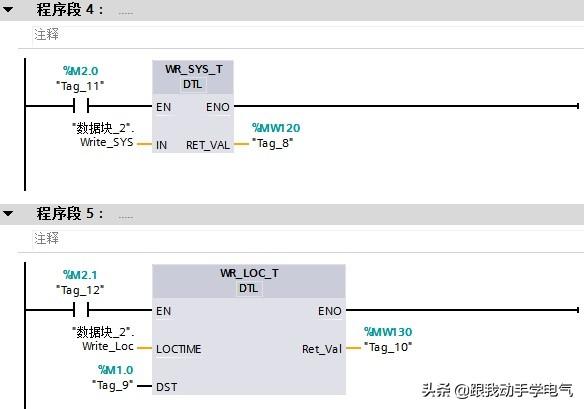
图6. 编程设置系统/本地时间。
如果“EN”端填写的变量信号状态为“TRUE”,则执行设置系统/本地时间指令。将用要设置的时间覆盖 CPU 时钟的系统/本地时间。
输出管脚“RET_VAL”为指令状态输出,具体含义参见指令帮助。
3.设置本地时间指令在夏令时与标准时间切换时的使用。
- 从标准时间切换到夏令时。
- 假设切换时间为凌晨 2:00,然后将时间向前移动一小时。 这意味着在 02:00:00:000000000 AM 和 02:59:59:999999999 AM 之间没有时间。如果“LOCTIME”指定的时间在此期间,将产生错误代码 W#16#8089。
- DST 参数与此无关。
- 从夏令时切换到标准时间。
- 假设切换时间为凌晨 3:00,然后将时间向后移动一小时。 这意味着在 02:00:00:000000000 AM 和 02:59:59:999999999 AM 之间有两小时。
- 因此对于“LOCTIME”中所有介于 02:00:00:000000000 AM 和 02:59:59:999999999 AM 的时间,需要声明该时间是在时间切换之前还是之后。DST 参数的用法如下:
- DST=TRUE 时,时间是两个小时中的第一个,即仍然在夏令时中。
- DST=FALSE 时,时间是两个小时中的第二个,即位于标准时间。
- 对于 LOCTIME 中所有位于双数小时之外的时间,DST 参数与此无关。
设置S7-1200CPU的时区
1.设置S7-1200CPU时区指令的调用。

图7.调用设置时区指令
2.设置S7-1200CPU时区指令的使用。
在DB块中创建数据类型“TimeTransformationRule”的变量,需要在数据类型一栏中直接输入“TimeTransformationRule”。
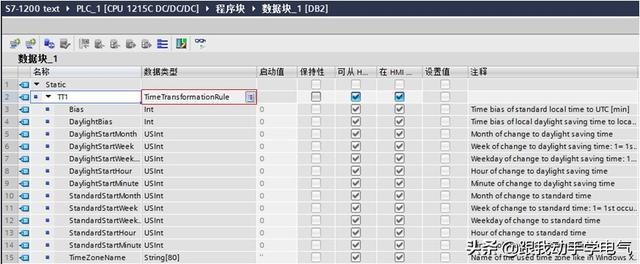
图8.在数据块中创建数据类型“TimeTransformationRule”的变量
此参数变量的具体含义参见指令帮助。
在OB1中编程,将“TimeTransformationRule”变量填写在输入管脚“Time Zone”,并通过触摸屏或者强制变量的方式给“TimeTransformationRule”变量写入所想要设置的时区相关参数 。
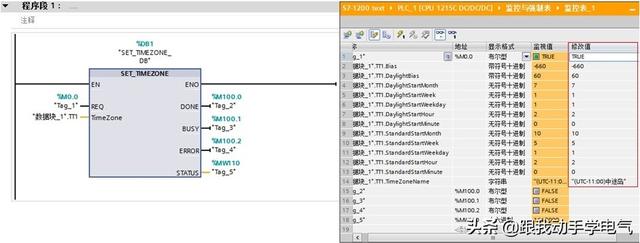
图9.编程设置CPU的时区
从上图可以看出,将CPU的时区设置为UTC-11:00,即本地时间与系统时间之间的时差为-660分钟。
输出管脚显示指令的完成、故障,状态等信息,具体含义参见指令帮助。
运行时间定时器的使用
1.运行时间定时器指令的调用。
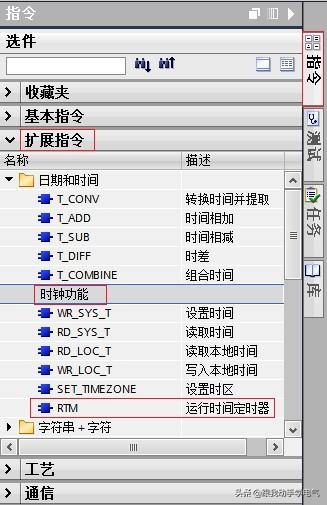
图10.调用运行时间定时器指令
2.运行时间定时器指令的使用。
使用该指令对 S7-1200CPU 的 32 位运行小时计数器执行设置、启动、停止和读取操作。
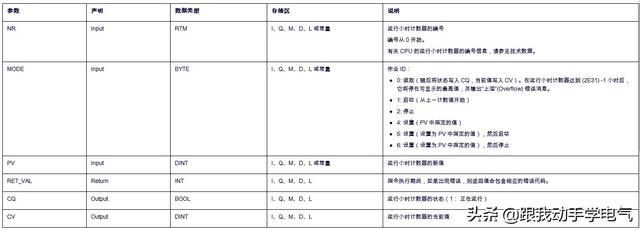
图11.运行时间定时器指令的管脚含义
在OB1中编程,输入参数 MODE的值设置为“5”,如果EN输入端的信号状态为“TRUE”,则执行“RTM”指令。CPU 的运行小时计数器设置为PV中的数值并启动。在启动运行小时计数器后,将输入参数 MODE的值设置为“0”。因此,“RTM”指令读取运行小时计数器的当前值并写入输出管脚CV。输出参数 CQ指示运行小时计数器正在运行。输出参数 RET_VAL指示处理正在运行,且无错误。
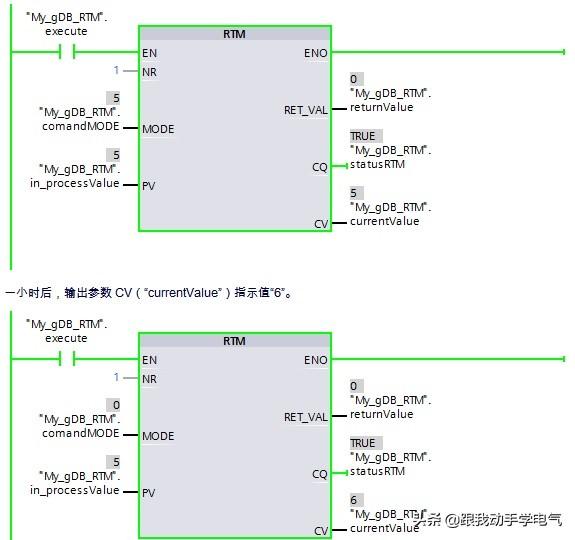
图12.编程使用运行时间定时器指令
常见问题
为什么 CPU 系统时钟比实际时间快一小时?
使用 STEP 7 V13 SP1 组态 S7-1200 CPU, 设备组态属性-常规-时间,默认的本地时间时区是UTC+01:00,即使更改时区为UTC+08:00,但仍然默认勾选"激活夏令时"。如下图13 所示:
虽然国内没有使用夏令时,时区选择UTC+08:00,读取的时钟仍然会比实际时钟快一小时。如要使系统时间与实际时间一致,取消勾选“激活夏令时",重新下载项目即可。
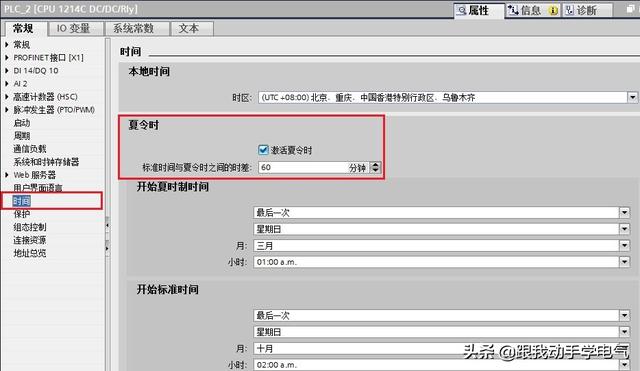
图13. 夏令时

















 6574
6574

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









