






其实电脑的玩游戏卡和配置我们都是可以自己查和自己对比的,如果玩游戏卡多半是因为电脑配置不够导致的,那么如何才能查看自己的电脑配置和跑分呢?下面是学习啦小编收集整理的如何查看电脑本机配置和跑分,希望对大家有帮助~~
查看电脑本机配置和跑分的方法
【查看电脑配置】
1,查看电脑配置有2种方法,看大概配置的办法,就是右击我的电脑,然后在弹出的二级菜单中选择电脑属性这个选项点击进入
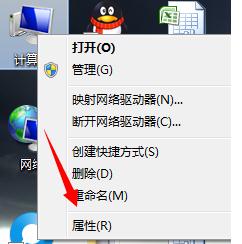
2,点击进入查看电脑属性后,在里面显示的就是你电脑的大概配置了,CPU、内存等,上面有一个数字比分,点击进去时你电脑的基础跑分

3,还有一个办法,就是通过电脑软件来查看,可以看到显卡、声卡、网卡等详细配置,使用腾讯电脑管家工具箱里面的硬件测评功能

4,打开硬件检测功能后,上面会自动检测和显示出电脑硬件的详细配置,点击左侧不同的硬件,可以查看硬件的详细规格

【电脑跑分】
1,想要看电脑跑分呢,就在硬件检测界面,点击硬件测评功能,点击进入后选择立即测评,就会自动对你电脑进行检测评价了

2,测评完成后,点击右下角的空白框,输入游戏名称,就知道你电脑配置是否足够了,比如说常玩的剑灵游戏,点击一下就知道了。

















 3248
3248

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









