






 本文介绍了机器人学基础理论,重点关注开源机器人控制软件OROCOS,尤其是其KDL组件,用于机器人动力学计算。同时,详细阐述了在Windows环境下OROCOS-KDL的安装步骤,包括下载源码、解压、配置CMake和编译安装。
本文介绍了机器人学基础理论,重点关注开源机器人控制软件OROCOS,尤其是其KDL组件,用于机器人动力学计算。同时,详细阐述了在Windows环境下OROCOS-KDL的安装步骤,包括下载源码、解压、配置CMake和编译安装。
一、概述
本系列文章主要研究机器人学的基础理论,以及研究开源机器人库OROCOS-KDL对机器人算法的实现。本文所有错误不足欢迎指正或讨论。
二、机器人学
机器人学是人们设计和应用机器人的技术和知识。机器人系统不仅由机器人组成,还需要其他装置和系统连同机器人一起来共同完成必须的任务。[^1] 机器人学内容主要有:运动学、动力学、轨迹规划、速度规划等。
三、开源机器人控制软件OROCOS
“Orocos”代表“Open Robot Control Software”,即开源机器人控制软件。 Orocos 为软件开发人员提供了开源的机器人软件框架,提供了很多功能,方 便开发人员快速的开发机器人软件模块。[^2] Orocos 由 Kinematics Dynamics Library,Bayesian Filtering Library 及 Orocos Toolchain 组成。 官方网站:orocos.org
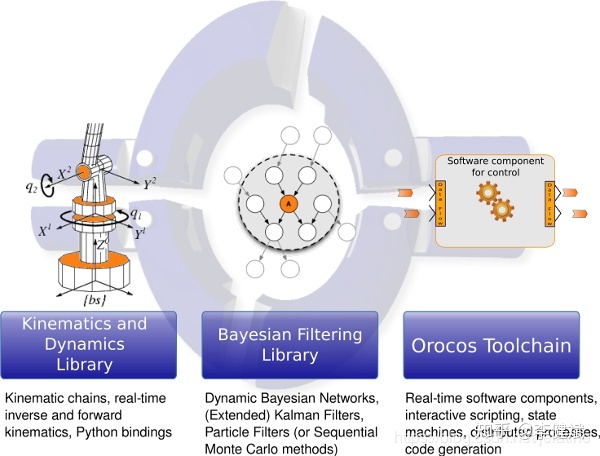
KDL(Kinematics and Dynamics):机器人运动学与动力学组件,为运动学提供了实时的动力学约束计算,这个组件非常有用,有了这个组件,很多机器人开发者可以快速地开发机器人算法。 BFL(Bayesian Filtering Library):贝叶斯过滤库提供了一个独立于应用程序的动态贝叶斯网络推导框架,即基于贝叶斯规则的递归信息处理和估计算法&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 821
821

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









