 ROS局域网通信实战
ROS局域网通信实战








ROS学习笔记(二):基于俩ubuntu16.04 中ROS系统的局域网通信——远程控制小乌龟
首先非常感谢白巧克力亦唯心的博客让我少走了不少弯路!
在本次实验中George在实验室中用的是一台Window10笔记本电脑和一台Window7工业控制计算机两台计算机上都安装的是ubuntu16.04都是通过同一个无线路由连接的
在本文章中
1、实现 工业控制计算机上启动talker.py节点,不断向笔记本上发送hello world。笔记本端启动roscore,和listener.py节点,接受控制计算机发来的消息!
2、实现在工业控制计算机上控制笔记本上的小乌龟!
咱们现在就开始吧!
一、两台计算机的准备工作
1.查看两台电脑各自的IP信息和主机名hostname:ifconfig
我在工业控制计算机上的的IP
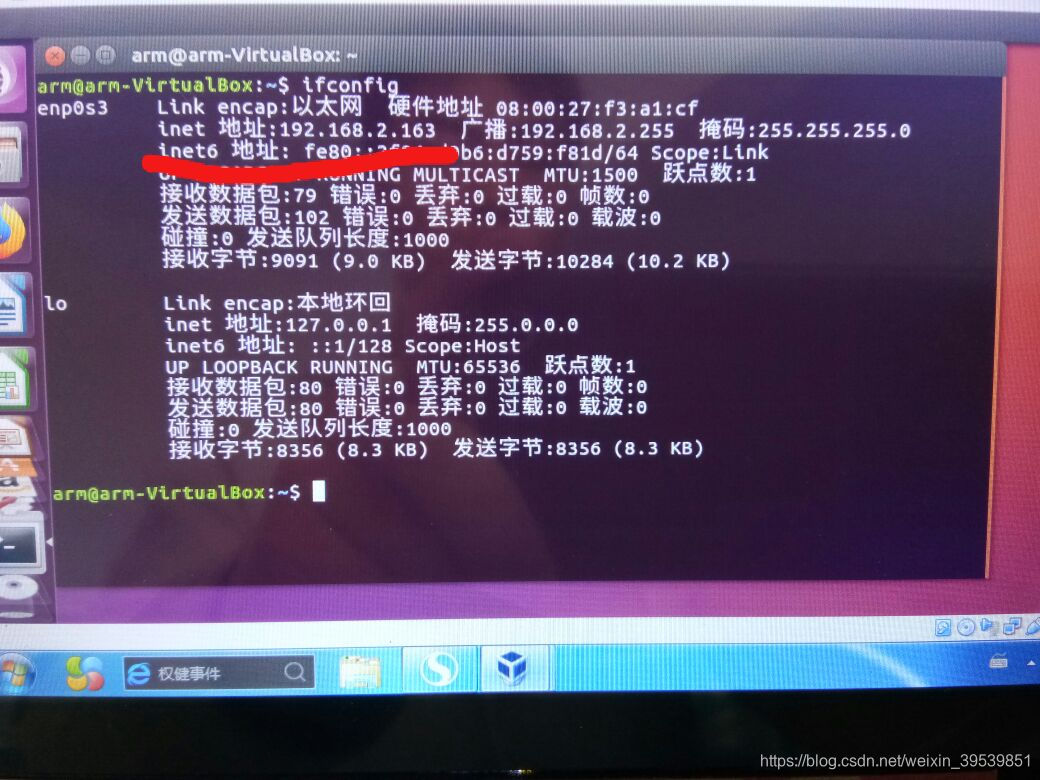
我是两台机器都通过wifi连接的所以我的工业控制计算机Ip就是192.168.2.163 笔记本的Ip获取方式相同!
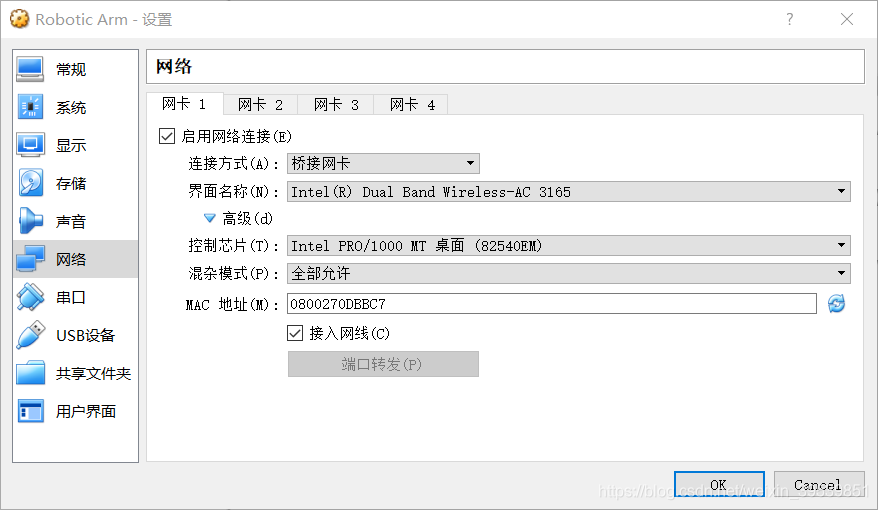
注意:当我第一次输入ifconfig是没有上图那样的IP出现,因为我是通过
Oracle VM VirtualBox虚拟机下装的Ubuntu16.04所以还得设置一下网络连接方式:连接方式改为桥接网卡混杂模式改为全部允许如下图所示:
获取两系统的hosts都在终端中输入:hostname
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















评论 1

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
查看更多评论
添加红包








