




 本文介绍了最小二乘问题的基本概念,包括定义1.1中的最小二乘问题、全局最小值和局部最小值的定义,以及如何通过梯度和海塞矩阵判断局部最小值。着重讲解了驻点和局部最小值的必要与充分条件。后续章节将探讨优化技术在非线性最小二乘问题中的应用。
本文介绍了最小二乘问题的基本概念,包括定义1.1中的最小二乘问题、全局最小值和局部最小值的定义,以及如何通过梯度和海塞矩阵判断局部最小值。着重讲解了驻点和局部最小值的必要与充分条件。后续章节将探讨优化技术在非线性最小二乘问题中的应用。
METHODS FOR NON-LINEAR LEAST SQUARES PROBLEMS(一)
分章节更新,剩下两部分一周内上传
1. 介绍和定义
在本手册中,我们考虑了以下问题
定义1.1. 最小二乘问题
寻找 x∗x^*x∗,即以下式子的局部最小值
F(x)=12∑i=1m(fi(x))2(1.1)
F(\pmb{x})=\frac{1}{2}\sum_{i=1}^{m}{(f_i(\pmb{x}))^2} \tag{1.1}
F(xxx)=21i=1∑m(fi(xxx))2(1.1)
其中,fi:Rn→R,i=1,...f_i:\mathbb{R}^n \to \mathbb{R},i=1,...fi:Rn→R,i=1,...,mmm 由函数给定,并且 m≥nm\geq nm≥n。
F(x)F(x)F(x) 的定义中的因子 12\frac{1}{2}21 对 x∗x^∗x∗ 没有影响。它是为了方便而引入的。
例子1.1.
最小二乘问题的一个重要来源是数据拟合。例如,考虑如下图所示的数据点 (t1,y1),...,(tm,ym)(t_1,y_1),...,(t_m,y_m)(t1,y1),...,(tm,ym):
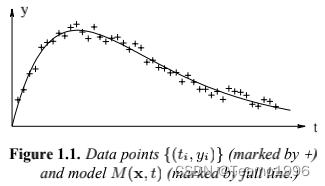
此外,我们还得到了一个拟合模型
M(x,t)=x3ex1t+x4ex2t
M(\pmb{x},t)=x_3 e^{x_1 t}+x_4 e^{x_2 t}
M(xxx,t)=x3ex1t+x4ex2t
该模型取决于参数x=[x1,x2,x3,x4]Tx=[x_1,x_2,x_3,x_4]^Tx=[x1,x2,x3,x4]T。我们假设存在一个x∗\pmb{x}^*xxx∗满足
yi=M(x∗,ti)+ϵi
y_i = M(\pmb{x}^*,t_i)+\epsilon_i
yi=M(xxx∗,ti)+ϵi
其中{ϵi}\{\epsilon_i\}{ϵi}是数据序列的(测量)误差,我们假定其行为类似于 “白噪声”。
对于任何给定的x\pmb{x}xxx,我们可以计算残差
fi(x)=yi−M(x,ti)=yi−x3ex1ti−x4ex2ti,i=1,...,m.
\begin{matrix}
&f_i(x)=y_i - M(\pmb{x},t_i) \\
&=y_i-x_3 e^{x_1 t_i} -x_4 e^{x_2 t_i}, i=1,...,m.
\end{matrix}
fi(x)=yi−M(xxx,ti)=yi−x3ex1ti−x4ex2ti,i=1,...,m.
对于最小二乘法的拟合,参数 x∗\pmb{x}^*xxx∗ 由最小化残差的平方之和来确定。这可以看作是一个当 n=4n=4n=4 时定义1.1中的问题。M(x∗,t)M(\pmb{x}^*,t)M(xxx∗,t) 的图形在图1.1中以实线显示。
最小二乘问题是更一般的问题的一个特殊变体:给定一个函数 F:Rn→RF:\mathbb{R}^n \to \mathbb{R}F:Rn→R,找到 FFF 的一个参数,使这个所谓的目标函数或成本函数的值最小。
定义1.2. 全局最小值
给定 F:Rn→RF:\mathbb{R^n} \to \mathbb{R}F:Rn→R。寻找
x∗=argminx{F(x)}(1.2)
\pmb{x}^*=argmin_{\pmb{x}}\{F(\pmb{x})\} \tag{1.2}
xxx∗=argminxxx{F(xxx)}(1.2)
这个问题在一般情况下很难解决,我们只介绍解决更简单的问题的方法,即寻找 FFF 的局部最小化值,一个在一定区域内给出 FFF 的最小值的参数向量。区域的大小由 δ\deltaδ 给出,其中 δ\deltaδ 是一个小的正数。
定义1.3. 局部最小值
给定 F:Rn→RF:\mathbb{R}^n \to \mathbb{R}F:Rn→R,寻找 x∗\pmb{x}^*xxx∗ 使得
F(x∗)≤F(x)for∣∣x−x∗∣∣<δ(1.3)
F(\pmb{x}^*) \leq F(\pmb{x}) \quad for \quad ||\pmb{x}- \pmb{x}^*||<\delta \tag{1.3}
F(xxx∗)≤F(xxx)for∣∣xxx−xxx∗∣∣<δ(1.3)
在本介绍的其余部分,我们将讨论优化的一些基本概念。第2章简要回顾了对于通用的代价函数寻找局部最小值的方法。关于更多细节,可以参考 Frandsen et al (2004)。在第三章中,我们给出了专门针对最小二乘问题的方法。
我们假设代价函数 FFF 是可微并且平滑的,这使得下面的泰勒展开是有效的,
F(x+h)=F(x)+hTg+12hTHh+O(∣∣h∣∣3)(1.4a)
F(\pmb{x}+ \pmb{h})=F(\pmb{x})+\pmb{h}^T\pmb{g}+\frac{1}{2} \pmb{h}^T\pmb{H}\pmb{h}+\mathit{O}(||\pmb{h}||^3) \tag{1.4a}
F(xxx+hhh)=F(xxx)+hhhTggg+21hhhTHHHhhh+O(∣∣hhh∣∣3)(1.4a)
除非另有说明,∣∣⋅∣∣||\cdot||∣∣⋅∣∣表示2-范数,∣∣h∣∣=h12+...+hn2||\pmb{h}||=\sqrt{h_1^2+...+h_n^2}∣∣hhh∣∣=h12+...+hn2。
其中 g\pmb{g}ggg 是梯度,
g=F˙(x)=[∂F∂x1(x)⋮∂F∂xn(x)](1.4 b)
\pmb{g} = \dot{F}(\pmb{x})=\begin{bmatrix}\frac{\partial F}{\partial x_1}(\pmb{x}) \\ \vdots \\ \frac{\partial F}{\partial x_n}(\pmb{x})\end{bmatrix} \tag{1.4 b}
ggg=F˙(xxx)=⎣⎢⎡∂x1∂F(xxx)⋮∂xn∂F(xxx)⎦⎥⎤(1.4 b)
H\pmb{H}HHH 是海塞矩阵
H=F¨(x)=[∂2F∂xi∂xj(x)](1.4 c)
\pmb{H}=\ddot{F}(x)=\begin{bmatrix} \frac{\partial^2 F}{\partial x_i \partial x_j}(\pmb{x})\end{bmatrix} \tag{1.4 c}
HHH=F¨(x)=[∂xi∂xj∂2F(xxx)](1.4 c)
如果 x∗\pmb{x}^∗xxx∗ 是一个局部最小值,并且 ∣∣h∣∣||\pmb{h}||∣∣hhh∣∣ 足够小,那么我们就无法找到一个使得 FFF 值更小的点x∗+h\pmb{x}^∗+\pmb{h}xxx∗+hhh。将这一观察与式(1.4a)结合起来我们可以得到
理论1.5. 局部最小值的必要条件
如果 x∗\pmb{x}^*xxx∗ 是局部最小值,则
g∗=F˙(x∗)=0
\pmb{g}*=\dot{F}(\pmb{x}^*)=0ggg∗=F˙(xxx∗)=0
我们对满足必要条件的参数使用一个特殊的名称:
定义1.6. 驻点
如果
gs=F˙(xs)=0
\pmb{g}_s = \dot{F}(\pmb{x}_s)=0
gggs=F˙(xxxs)=0
则 xs\pmb{x}_sxxxs 被称为 FFF 的一个驻点。
因此,局部最小值也是一个驻点,而局部最大值也是如此。一个既不是局部最大值也不是局部最小值的静止点被称为鞍点。为了确定一个给定的驻点是否是局部最小值,我们需要在泰勒级数(1.4a)中包含二阶项。代入 xs\pmb{x}_sxxxs ,我们看到
F(xs+h)=F(xs)+12hTHsh+O(∣∣h∣∣3)(1.7)
F(\pmb{x}_s+\pmb{h})=F(\pmb{x}_s) + \frac{1}{2}\pmb{h}^T\pmb{H}_s \pmb{h}+\mathit{O}(||\pmb{h}||^3) \tag{1.7}
F(xxxs+hhh)=F(xxxs)+21hhhTHHHshhh+O(∣∣hhh∣∣3)(1.7)
其中 Hs=F¨(xs)\pmb{H}_s = \ddot{F}(\pmb{x}_s)HHHs=F¨(xxxs)
从海塞矩阵的定义(1.4c)可以看出,任何 H\pmb{H}HHH 都是一个对称矩阵。如果我们要求 Hs\pmb{H}_sHHHs 是正定的,那么它的特征值需要大于某个数字 δ>0\delta>0δ>0(见附录A),并且
hTHsh≥δ∣∣h∣∣2
\pmb{h}^T\pmb{H}_s\pmb{h} \geq \delta ||\pmb{h}||^2
hhhTHHHshhh≥δ∣∣hhh∣∣2
这表明,对于足够小的 ∣∣h∣∣||\pmb{h}||∣∣hhh∣∣,(1.7)式右边的第三项将被第二项所支配。这个项是正的,所以我们得到
理论1.8. 局部最小值的充分条件
假设 xs\pmb{x}_sxxxs 是一个驻点,并且 F¨(xs)\ddot{F}(\pmb{x}_s)F¨(xxxs) 是正定的。 那么 xs\pmb{x}_sxxxs 是一个局部最小值。
如果 Hs\pmb{H}_sHHHs 是负定的,那么 xs\pmb{x}_sxxxs 就是一个局部最大值。如果 Hs\pmb{H}_sHHHs 是不定的(即它的特征值有正有负),那么 xs\pmb{x}_sxxxs 是一个鞍点。

















 607
607




 到【灌水乐园】发言
到【灌水乐园】发言







