







前言
在平时的工作中,经常使用Opencv中的fitLine()函数,解决一些工业视觉检测的问题。如图所示:为了检测出玻璃切割上下磨损区域的宽度,可以先对其进行直线拟合,再提取几个检测点,计算平均距离,作为最终的检测宽度。
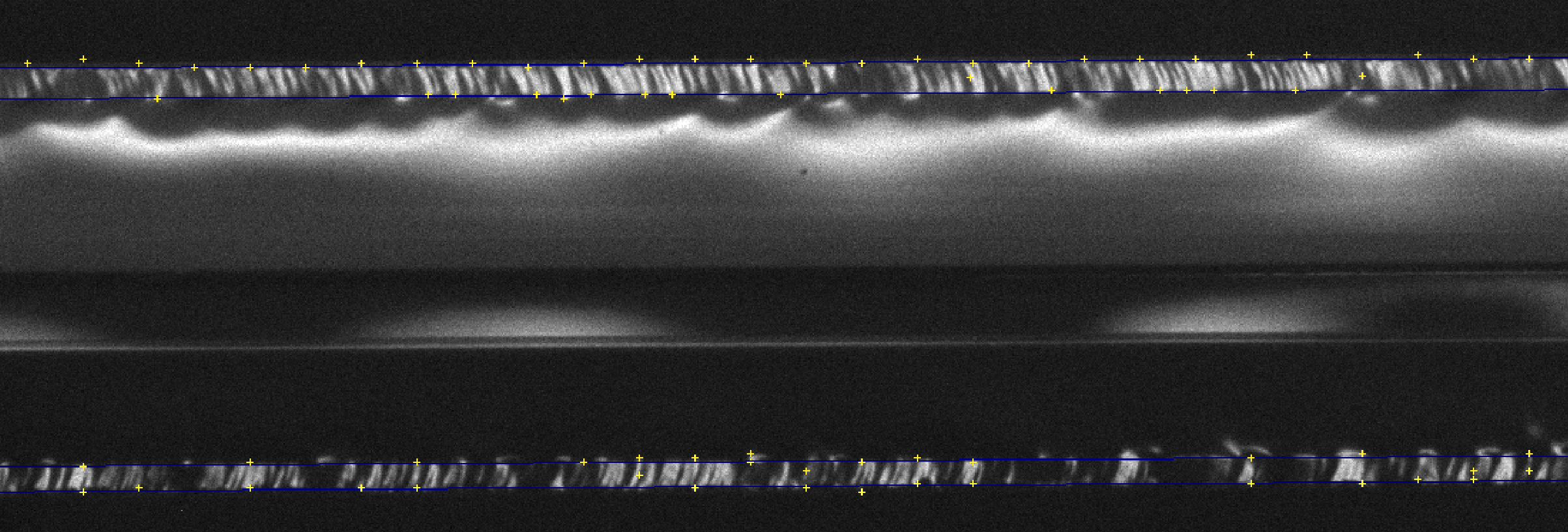
对于这种宽度的磨损区宽度的检测,通常分为一下两个步骤:
- 如何在图像上提取出用于拟合的特征点;
- 根据特征点计算出直线所对应的参数。
拟合的特征点我们可以通过最大梯度变化的位置,进行定位。当用于拟合的点与真实直线上的点误差较小时,使用DIST_L2参数,既最小二乘法,即可得到不错的结果。但对于上图场景来说,磨损区域的纹理和拍照的阴影区域的变化较大,有可能会导致出现一些误差较大的定位点。这时,选择DIST_HUBER参数,则能得到较DIST_L2更为准确的结果。Opencv官方文档中,关于fitLine()参数的介绍如下图所示:
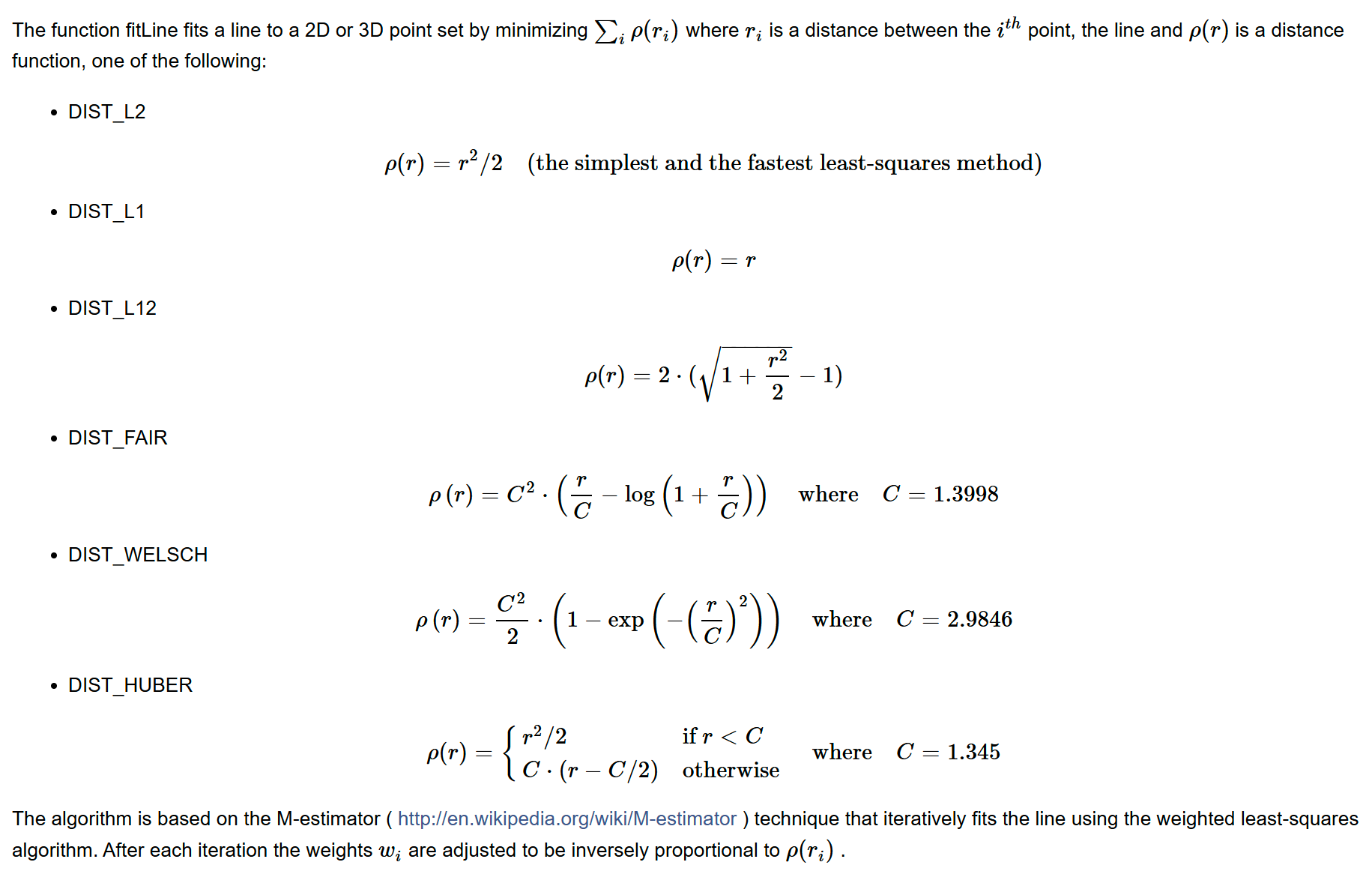
文档中只给出了简单的原理性说明,对于喜欢搞清详细原理的博主来说,还是远远不够的,因此便做了一点研究,写下此文,便于总结分享。
一、极大似然估计
fitLine()拟合直线原理,其文档中原理说明如下:

该算法是基于M-estimation(最大似然估计)实现的,即使用加权的最小二乘算法进行迭代拟合。每次迭代后,权重wi随误差和p(ri)成反比例调整。
是不是感觉跟神经网络中每个感知机的权重调节方式是类似啊呀!
接下来,我们根据这个原理,依次讲解相关的知识点
最大似然估计(MLE),是一种统计方法,用于估计一个概率模型的参数。其基本思想是:在已知某个参数能使样本出现的概率最大时,选择这个参数作为估计的真实值。直观地说,如果一个参数使得观测到的数据出现的概率最大,那么这个参数就是最可能的真实值
下文中 对数似然函数 和 最小二乘法 的讲解,均引用自该博文:(https://blog.youkuaiyun.com/afgc223/article/details/133681873)


使用最小二乘法求解的方法网上资源很多,这里就不进行说明了。
二、迭代拟合
第一次最小二乘计算,我们使对数似然函数最大的公式为:

即,给每个拟合点赋予了相同的权重。由于可能可能出现个别拟合点偏离直线距离较大,导致此时得到的结果并不一定是准确的,因此,我们需要给不同的拟合点赋予不同的拟合权重,进行迭代计算。
每个拟合点的权重可以与其残差p(ri)成反比例调整。比如,当 fitLine()拟合参数选择DIST_L2时,残差为
![]()
r 为拟合点到本次计算出的直线的距离。根据残差,计算出每个拟合点的权重a1,a2,…,an,得到新的使对数似然函数最大的公式:
![]()
据此便可进行第二次的最小二乘计算。
经过数次迭代,当两次迭代结果之差满足设定的阈值时,迭代结束,得到最终结果

至此,当拟合点中有很多误差较大的点时,我们对fitLine()函数选择拟合参数DIST_HUBER 优于 DIST_L2 的原因,大概可以有点感觉了。因为使用的残差计算方法不同,导致权重的分配也不相同。残差计算方法的原因还需进一步详细了解
三、RANSAN 直线拟合算法
参考文章 : https://blog.youkuaiyun.com/chinaswin/article/details/68066295
直接使用fitLine()函数进行直线拟合,一般只适用于噪声点较少的场景,当噪声点很多时,如图所示:

此时,就需要使用 RANSAC(RANdom SAmple Consensus,RANSAC)算法,即 随机抽样一致算法。该算法假设数据中包含正确数据和异常数据(或称为噪声)。正确数据记为内点(inliers),异常数据记为外点(outliers)。得到一系列内点后,再进行 直线拟合,即可减小过多噪声的影响。
算法基本思想
如下图所示,存在很多离散的点,而我们认为这些点构成了一条直线。当然,人眼能很清晰地拟合出这条直线,找到外点。但要让计算机找到这条直线,在很久之前是很难的,RACSAC的出现是通过数学之美解决这一难题的重要发明。
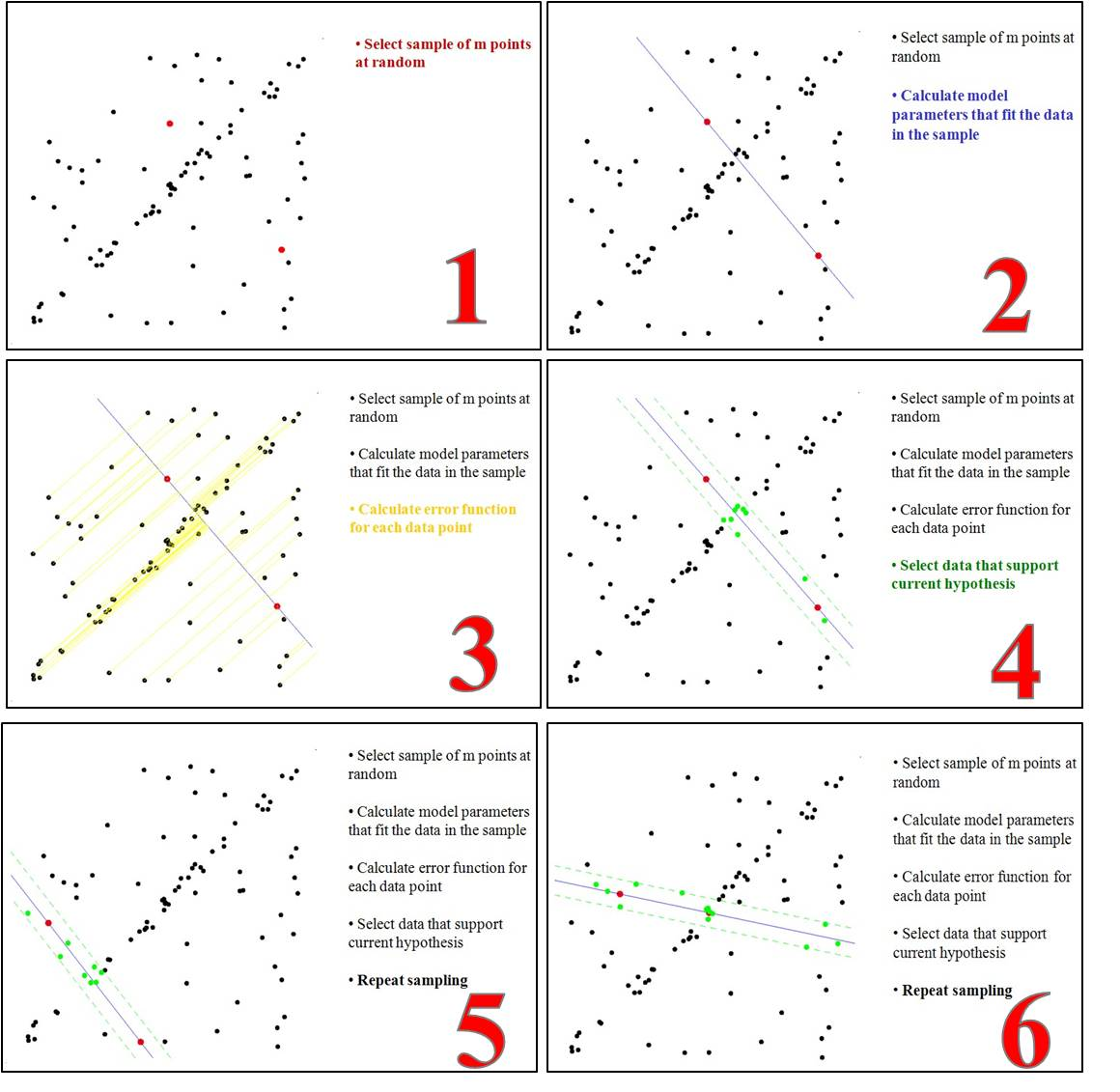
算法步骤:
(1)随机选择两个点,用于拟合直线方程(一条直线至少需要两个点确定)
(2)通过这两个点,我们可以计算出这两个点所表示的直线方程 y=ax+b
(3)将所有的数据点带入这个直线方程计算误差
(4)找到所有满足误差阈值的点(第4幅图中可以看到,只有很少的点支持这个模型)
(5)重复(1)~(4)这个过程,直到达到一定迭代次数后,我们选出那个被支持的最多的模型,作为问题的解。如下图所示:

C++代码实现
cv::Vec4f AlgKernel::fitLineRansac(const std::vector<cv::Point2d>& vecPts, DistanceTypes fitlinedistype, std::vector<cv::Point2d>& inlierPts, const double & residErr)
{
Vec4f line;
int numPts = (int)vecPts.size();
if (numPts < 2) return Vec4f();
int iterCnt = 50;
const int minCnt = 2; //拟合直线最少抽样个数
int nIter = 0; //统计迭代次数
int nInlierMax = 0; //保存内点数量最大值
double modelRes = 0; //模型残差初始化
vector<bool> inlierFlag = vector<bool>(numPts, false); //内点标识初始化
//step1 随机生成点的下标
static default_random_engine rng;
static uniform_int_distribution<unsigned> uniform;
decltype(uniform.param()) new_range(0, numPts - 1);
uniform.param(new_range); //设定随机数范围
rng.seed(1); //初始化
std::set<unsigned int> selectIndexs; //选择点的下标,自动排序
vector<Point2f> selectPts; //选择点
double A = 0.0, B = 0.0, C = 0.0;
//step2 使用Ransac提取内点
while (nIter < iterCnt) { //执行迭代
selectIndexs.clear();
selectPts.clear();
int inlierCnt = 0; //统计当前迭代中内点个数
vector<bool> inliersTemp; //临时内点标识
//1.随机选取minCnt个点
while (1) {
unsigned int index = uniform(rng);
selectIndexs.insert(index);
if (selectIndexs.size() == minCnt) { break; }
}
//2.获取抽样点
std::set<unsigned int>::iterator selectItc = selectIndexs.begin();
while (selectItc != selectIndexs.end()) {
unsigned int index = *selectItc;
selectPts.push_back(vecPts[index]);
selectItc++;
}
//3.根据残差统计内点个数
calcLinePara(selectPts, A, B, C, modelRes);
for (unsigned int i = 0; i < numPts; i++) {
Point2f pt = vecPts[i];
double resid_ = fabs(pt.x * A + pt.y * B + C);
//residualsTemp.push_back(resid_);
inliersTemp.push_back(false);
if (resid_ < residErr) { //阈值范围内
++inlierCnt;
inliersTemp[i] = true;
}
}
//4.根据内点个数更新结果
if (inlierCnt >= nInlierMax) {
nInlierMax = inlierCnt;
//resids_ = residualsTemp;
inlierFlag = inliersTemp;
}
else if (inlierCnt == 0) { //此时迭代次数趋于无穷大
iterCnt = 500;
}
else { //内点数量减少,更新迭代次数
double inlierRatio = double(inlierCnt) / numPts;
double p = 0.99;
double s = 2.0;
iterCnt = int(std::log(1.0 - p) / std::log(1.0 - pow(inlierRatio, s))); //计算迭代次数
}
++nIter;
}//end_while
//step3 对内点进行最小二乘法拟合
inlierPts.clear();
for (int i = 0; i < numPts; ++i)
{
if (inlierFlag[i])
inlierPts.push_back(vecPts[i]);
}
if (inlierPts.size() < 2) return Vec4f();
cv::fitLine(inlierPts, line, fitlinedistype, 0, 0.01, 0.01);
return line;
}
本文主要是博主的自我总结与分享,如有不当之处,还望帮忙指出,万分感谢!

















 4258
4258

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









