







 该博客详细介绍了使用MRT-LBM(多Relaxation Time Lattice Boltzmann Method)在MATLAB中模拟旋转圆柱绕流的过程,针对王富海2017年版本的不足进行了补充和修正,包括速度边界条件、拉格朗日点的处理等。博客还提供了QQ交流群,并分享了完整的仿真代码。
该博客详细介绍了使用MRT-LBM(多Relaxation Time Lattice Boltzmann Method)在MATLAB中模拟旋转圆柱绕流的过程,针对王富海2017年版本的不足进行了补充和修正,包括速度边界条件、拉格朗日点的处理等。博客还提供了QQ交流群,并分享了完整的仿真代码。
%这段代码之前发过,结束后生成图也都贴出来了,但是很多地方没有写出详细的说明,加上王富海的3.2图做的一塌糊涂,力的计算引用自王星,但是王星的学位论文画图也是字母全标错了,当时看到这里也是欲哭无泪。拜托你们毕业的能不能认真一点。所以在这再发一次,对一些内容进行补充。
%还是老规矩先宣传一下QQ群: 格子玻尔兹曼救星:293267908。不收费的哦,就是为了早点毕业建的群。
%这个例子采用 MRT-LBM 模拟旋转圆柱绕流
%左边速度边界-泊肃叶流,右边压力边界,上下无滑移壁面(全部用非平衡外推格式)
%基于 MRT-LBM 的流场与声场仿真计算 --王富海2017
clc
clear
close all
% 设置仿真参数
uMax=0.05; %中间最大速度
Re=40;%雷诺数
yLen=81;%垂直方向格子数
xLen=161;%水平方向格子数
cylinderD=(yLen-1)/5;%圆的半径
nu=uMax*cylinderD/Re;%运动粘性
Cs=sqrt(1/3);%格子声速
tau=1/2+3*nu;%松弛时间
omega=1/tau;%松弛频率
step=120000;%最大迭代次数
rho_out=1;%出口密度
uo2=0.1;%圆柱的旋转速度
rhoo=1;%初始化密度
checkStep=100;%收敛计算间隔
saveStep=20;%保存结果间隔
% file Path=uigetdir(cd)%仿真中间过程图片的保存路径
VSSum=[];%所有节点格子速度总和-每 saveStep 步记录一次
VSSum2=[];%所有节点格子速度总和-每 checkStep 步记录一次,监视收敛曲线
dx=1;%相邻格子节点水平间隔
dy=1;%相邻格子节点垂直间隔
dt=1;
y1=1;%下边界垂直坐标
y2=yLen;%上边界垂直坐标
GG=uMax/((y1-y2)^2/4);
for j=1:yLen
U_in(1,j)=uMax;%左边的速度剖面入口
V_in(1,j)=0;
end
%为上下壁面边界点速度赋值
ub(1:xLen,1)=0;
vb(1:xLen,1)=0;
ub(1:xLen,yLen)=0;
vb(1:xLen,yLen)=0;
f_u(1,1)=0;
f_u(xLen,yLen)=0;
f_v(1,1)=0;
f_v(xLen,yLen)=0;
%导入拉格朗日点坐标--圆的方程式(x-xPos)^2+(y-yPos)^2=r^2;
xPos=2*cylinderD+cylinderD/2;%圆心坐标 x
r=cylinderD/2;
yPos=(yLen+1)/2;%圆心坐标 y
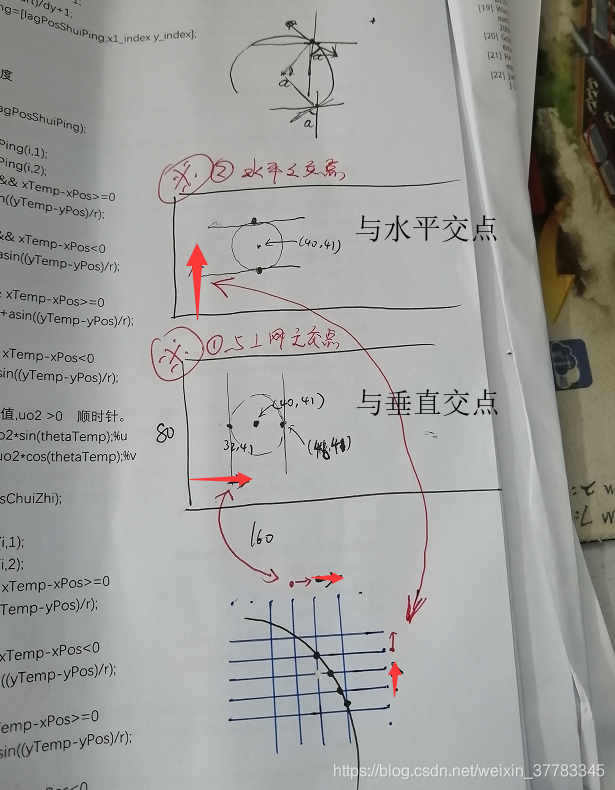
% 计算与垂直网格的交点
lagPosChuiZhi=[];%存储拉格朗日点-位置索引
x_Start=1;
x_Stop=xLen;
y_Start=1;
y_Stop=yLen;
for i=x_Start:dx:x_Stop
delta=r^2-(i-xPos)^2;
if delta>0
y1=yPos+sqrt(delta);%垂直交点的真正 y1 坐标
y2=yPos-sqrt(delta);%垂直交点的真正 y2 坐标
y1_index=(y1-y_Start)/dy+1;%垂直交点的 y 网格索引
y2_index=(y2-y_Start)/dy+1;%垂直交点的 y 网格索引
x_index=(i-x_Start)/dx+1;%x 的网格索引
lagPosChuiZhi=[lagPosChuiZhi;x_index y1_index;x_index y2_index];
elseif delta==0
y1=yPos+sqrt(delta);%垂直交点的真正 y 坐标
y1_index=(y1-y_Start)/dy+1;
x_index=(i-x_Start)/dx+1;
lagPosChuiZhi=[lagPosChuiZhi;x_index y1_index];
end
end
%计算与水平网格的交点
lagPosShuiPing=[];%存储拉格朗日点-位置索引
for i2=y_Start:dy:y_Stop
delta=r^2-(i2-yPos)^2;
if delta>0
x1=xPos+sqrt(delta);%水平交点的真正 x1 坐标
x2=xPos-sqrt(delta);%水平交点的真正 x2 坐标
x1_index=(x1-x_Start)/dx+1;%水平交点的 x 网格索引
x2_index=(x2-x_Start)/dx+1;%水平交点的 x 网格索引
y_index=(i2-y_Start)/dy+1;%y 的网格索引
lagPosShuiPing=[lagPosShuiPing;x1_index y_index;x2_index y_index];
elseif delta==0
x1=xPos+sqrt(delta);%水平交点的真正 x 坐标
x1_index=(x1-x_Start)/dx+1;
y_index=(i2-y_Start)/dy+1;
lagPosShuiPing=[lagPosShuiPing;x1_index y_index];
end
end
% 为拉格朗日点附上速度
lenLagShuiPing=length(lagPosShuiPing);
for i=1:lenLagShuiPing
xTemp=lagPosShuiPing(i,1);
yTemp=lagPosShuiPing(i,2);
if yTemp-yPos>=0 && xTemp-xPos>=0 %逆时针第一象限
thetaTemp=asin((yTemp-yPos)/r);
end
if yTemp-yPos>=0 && xTemp-xPos<0 %第二象限
thetaTemp=pi-asin((yTemp-yPos)/r);
end
if yTemp-yPos<0 && xTemp-xPos>=0 %第四象限
thetaTemp=2*pi+asin((yTemp-yPos)/r);
end
if yTemp-yPos<0 && xTemp-xPos<0 %第三象限
thetaTemp=pi-asin((yTemp-yPos)/r);
end
%为拉格朗日点速度赋值,uo2 >0 顺时针。
lagPosShuiPing(i,3)=uo2*sin(thetaTemp);%u 将uo分解为水平速度
lagPosShuiPing(i,4)=-uo2*cos(thetaTemp);%v。1象限,uo顺时针方向分解后的v为负值,然而cos当 0~90度却为正值,所以加负号
end
lenLagChuiZhi=length(lagPosChuiZhi);
for i=1:lenLagChuiZhi
xTemp=lagPosChuiZhi(i,1);
yTemp=lagPosChuiZhi(i,2);
if yTemp-yPos>=0 && xTemp-xPos>=0
thetaTemp=asin((yTemp-yPos)/r);
end
if yTemp-yPos>=0 && xTemp-xPos<0
thetaTemp=pi-asin((yTemp-yPos)/r);
end
if yTemp-yPos<0 && xTemp-xPos>=0
thetaTemp=2*pi+asin((yTemp-yPos)/r);
end
if yTemp-yPos<0 && xTemp-xPos<0
thetaTemp=pi-asin((yTemp-yPos)/r);
end
%为拉格朗日点速度赋值,uo2 >0 顺时针。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









