







 本文深入探讨了ADAS算法设计中的行为决策过程,特别是自动换道行为规划,利用有限状态机和马尔科夫决策过程进行轨迹和行为计算。在实际的工业级应用中,基于规则的决策系统因其简单、安全和可靠性成为主流解决方案。此外,文章强调了场景层次化处理在决策模块中的重要性。
本文深入探讨了ADAS算法设计中的行为决策过程,特别是自动换道行为规划,利用有限状态机和马尔科夫决策过程进行轨迹和行为计算。在实际的工业级应用中,基于规则的决策系统因其简单、安全和可靠性成为主流解决方案。此外,文章强调了场景层次化处理在决策模块中的重要性。

 知圈 | 进“汽车信息安全社群”,请加微13636581676,备注安全
知圈 | 进“汽车信息安全社群”,请加微13636581676,备注安全
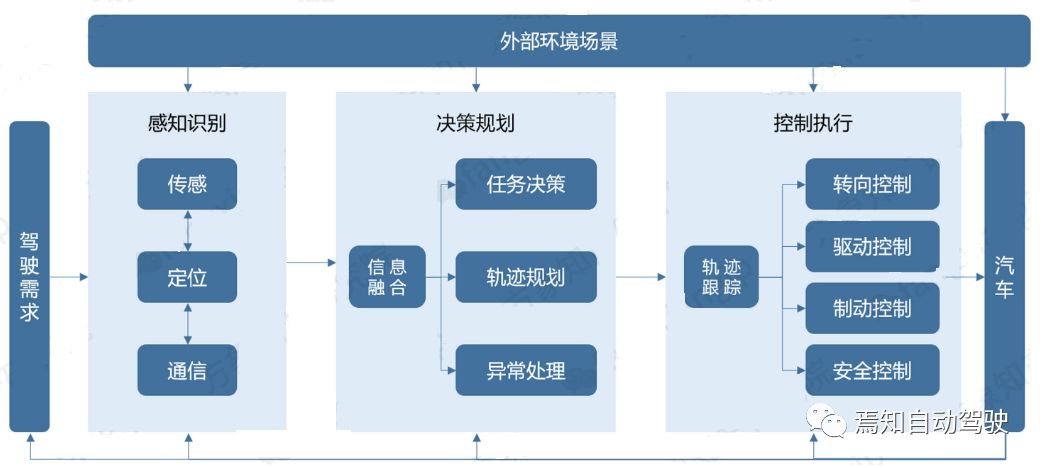
行为决策、规划和控制时计算自动驾驶车辆如何利用规划好的轨迹线操控自身进行进行移动的模块,它需要将原始数据进行消耗和处理,处理后的数据计算可得出行为层面的决策。这一模块实际上扮演了“辅助驾驶员”的角色,需要权衡每一份输入的原始信息,做出有效、安全的决策结果。
原始数据输出模块 |
原始数据 |
特殊需求说明 |
路径规划模块 |
一系列车道以及他们期望的起始和结束位置 |
进入车道和离开车道的位置 |
车辆自身属性 |
即时位置、即时车道、即时相对车道位置、车速、航向、目标车道 |
即时位置和目标车道是由高精地图进行定位输出 |
车辆历史信息 |
车辆周围障碍物信息,包括所处车道、速度、朝向、潜在意向和据此预测到的轨迹。 |
该输出主要来自感知和预测模块,要求探测范围是一定半径内的所有周边物体 |
交通和地图信息 |
车道以及相互之间的关系、车道间的交通标示(车道线类型、车道类型如匝道、隧道等) |
车道定位主要利用高精度地图输出,车道交通标示可利用车辆视觉传感器进行输出也可结合导航地图信息进行输出 |
当地交通规则 |
限速标示、路口交通灯 |
一般情况下,利用视觉传感器探测的交通规则更加准确 |
行为决策需要考虑所有输入所产生的输出影响,由于这些原始数据类型各不相同,各地交通规则也各不相同,想要使用统一的数学模型进行求解是十分困难的,因为这种模型是实时变化的。如果我们能设计一个基于交通规则和环境信息的系统化模型输出就会使问题简单化。下面列举自动换道过程设计中的基本思想,可以表示如下,利用具有代价函数的有限状态机(Finite-State-Machine,FSM)来确切的计算无人驾驶
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1342
1342

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









