







 本文详细介绍了如何在VS2019中连接MySQL8.0数据库,包括设置VC++目录、C/C++选项、链接器选项,以及添加必要的库文件。同时提供了一个简单的测试代码示例,帮助读者理解和实现数据库连接。
本文详细介绍了如何在VS2019中连接MySQL8.0数据库,包括设置VC++目录、C/C++选项、链接器选项,以及添加必要的库文件。同时提供了一个简单的测试代码示例,帮助读者理解和实现数据库连接。
1.首先准备好VS2019以及mysql数据库,两者都可以去官网下载,我们直接描述连接过程。
2.连接:
第一步:打开mysql的安装目录,我本地的安装目录如下:(注意是否有include和lib文件夹)

第二步:打开VS2019,新建一个空工程。
第三步:右击工程名,打开属性页:
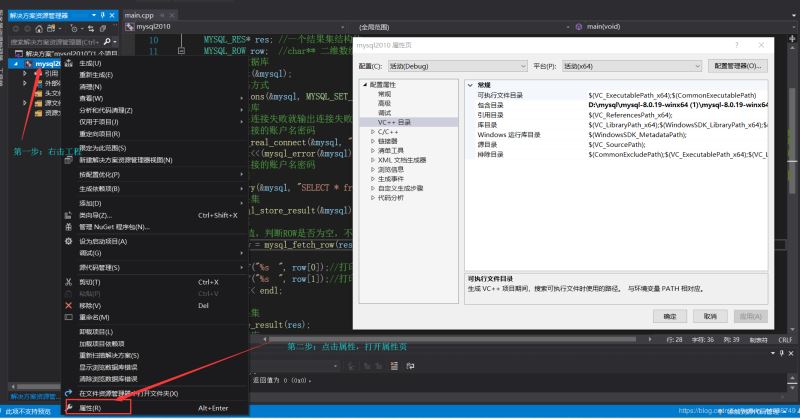
第四步:打开VC++目录,在包含目录中,将mysql安装文件中的include文件的路径添加到这里:

第五步:还是在属性页上,打开C/C++,选择常规,和上一步一样,在附加包含目录中将mysql文件中的include文件路径添加进来:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1479
1479

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









