






 本文介绍了如何使用Wedo2.0进行巡线机器人的编程,包括运动传感器的功能、四种常见状态及其注意事项,以及入门级和大师级巡线的编程技巧。建议在编程时控制好速度,避免翻车。还提供了使用Scratch3.0进行巡线的参考,并分享了获取图纸和加入乐高交流群的方式。
本文介绍了如何使用Wedo2.0进行巡线机器人的编程,包括运动传感器的功能、四种常见状态及其注意事项,以及入门级和大师级巡线的编程技巧。建议在编程时控制好速度,避免翻车。还提供了使用Scratch3.0进行巡线的参考,并分享了获取图纸和加入乐高交流群的方式。

于我,在这个凋零都感受到诗意横溢的秋,只想做一件事,拈一片绯红的枫叶,轻轻地刻上我的心语。对信仰,是我今生永不改变的主题!而后,幸福的寄往有你的那个城市。


巡线机器人
一直都有老师在问Wedo2.0该怎么巡线,这个机器人该怎么做?
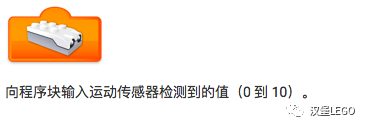
今天来给大家介绍一下Wedo2.0运动传感器功能的介绍:
四种常见状态

这几种状态在运行的过程需要注意一点,传感器在第二次判断时的初始化状态,如果不对,会造成程序错误,使机器人程序错乱。
解决方案:点击停止,重新启动就好。
巡线模块
Wedo2.0在巡线过程中一定要注意速度不要过快
不然翻车的概率会大大提升
具体程序介绍见文末







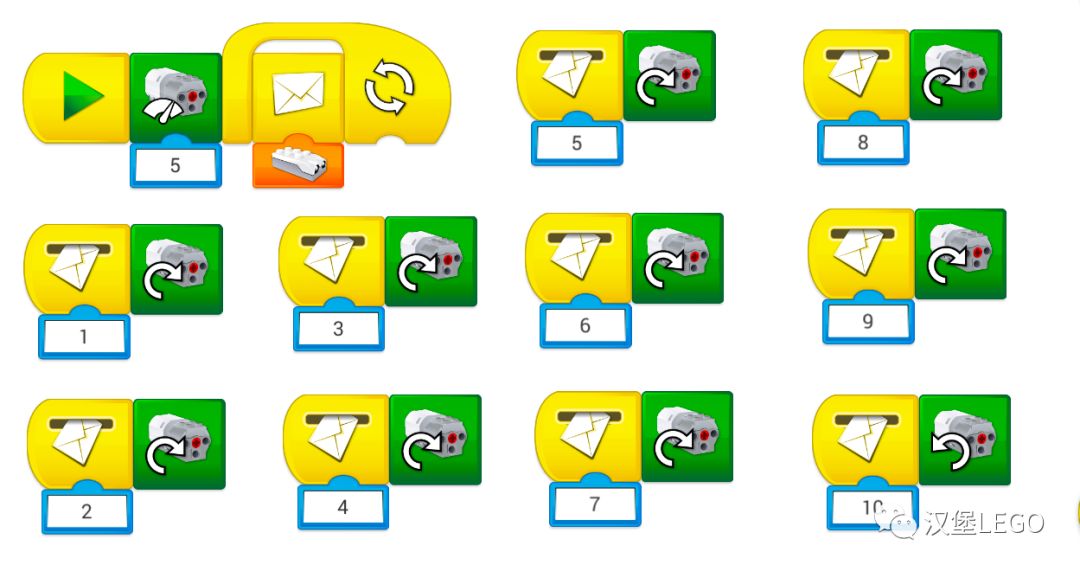
入门级巡线
通过两种判定条件来完成程序的编写:
1.黑色:数值10,黑色不反光,99%的状态下都是10,偶尔会因为外界光,导致黑色数值变成8或9;顺时针旋转
2.其他颜色:数值1-9;逆时针旋转
3.方向可以自我调节
大
大师级巡线
大师级巡线
巡线的过程中,很多颜色数值是不需要的,其实可以直接忽略掉,正常情况下的巡线,我们可以编程前用运动传感器去读取桌子上不同的数值,单独给这些数值编程即可。

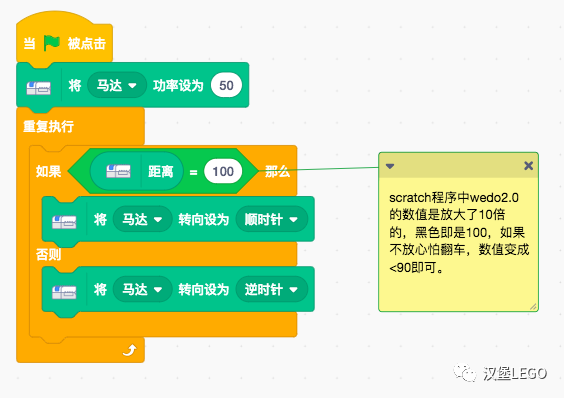
scratch3.0巡线
往期回顾
Wedo2.0--缆车
Wedo2.0--电钻
Wedo2.0--火车
Wedo2.0--面具
福利时间更新不易,学习不易,公众号后台回复巡线,即可获得图纸;为了让圈里更多的老师有一个可以交流学习的平台,可以添加下方微信,备注我要进群,即可进去大宝老师的乐高交流群,一起交流学习。

公众号


微信号


















 2361
2361

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









