







简介:OV7725二值化是一种应用于图像预处理的常用技术,用于将摄像头捕获的图像数据转换为二值图像。本文深入探讨了OV7725传感器的特性、二值化的原理以及如何在实际应用中实现。OV7725传感器以其高质量视频捕获、低功耗和高灵敏度特性,在多个领域中得到广泛应用。文章概述了实现二值化处理的步骤,并介绍了在”LCD&OV7725”项目中的应用,展示了其在嵌入式系统中的实际价值。同时,提出了优化二值化效果的策略,如动态阈值、多级阈值和Otsu二值化方法。
1. OV7725传感器概述
1.1 OV7725传感器简介
OV7725是Omni Vision公司生产的一款高性价比的CMOS VGA图像传感器。它具备优秀的图像捕捉能力,在分辨率和光线适应性方面表现出色,广泛应用于安防监控、车载系统和机器视觉等领域的图像采集。
1.2 OV7725的技术特性
该传感器支持多种图像分辨率,包括VGA(640x480)、QVGA(320x240)等,且具有自动曝光、自动增益和白平衡调整功能。它能够通过并行接口输出图像数据,与微控制器或其他图像处理单元配合,实现高质量的视频和图像处理。
1.3 应用场景及优势
在实际应用中,OV7725由于其体积小、集成度高、功耗低等特点,特别适用于移动设备和远程监控。其提供的灵活配置选项使得开发者可以根据不同场景的需求,调节参数以获取最佳图像效果,从而为用户提供更加精确和可靠的视觉信息。
2. 图像二值化原理
图像处理是计算机视觉和机器学习的重要组成部分,而图像二值化又是图像处理的一个基础操作,其目的主要是为了简化图像数据,突出关键特征,以便于后续处理和分析。本章将详细介绍图像二值化的概念、数学基础、以及其在图像处理中的作用。
2.1 图像处理基本概念
2.1.1 什么是图像二值化
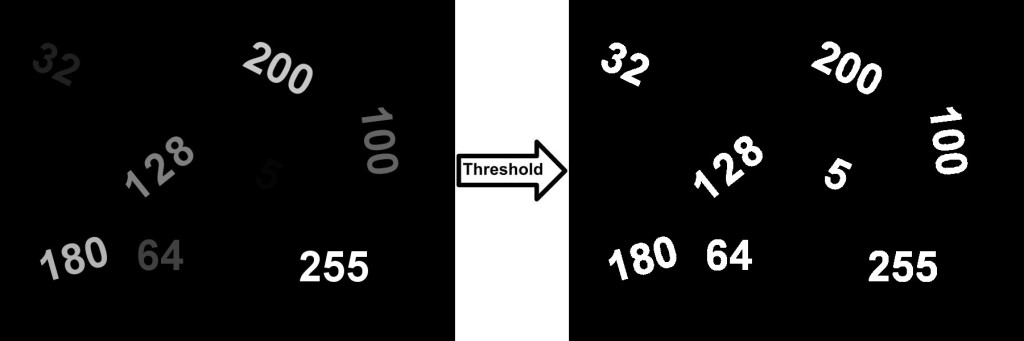
图像二值化是指将彩色图像或者灰度图像转化为只有黑白两种颜色的图像处理技术。在二值图像中,每个像素点的值只能是0(黑色)或者255(白色),这样的处理方式极大简化了图像的复杂性,使得图像的分析和处理更加高效。
图像二值化处理常常应用于文档扫描、文字识别和图像分割等场景。它能有效分离前景物体和背景,为后续的图像分析提供便利。
2.1.2 二值化在图像处理中的作用
二值化在图像处理中的作用可以归纳为以下几点:
- 简化图像数据:通过减少颜色种类,大幅减少图像的复杂度。
- 提高处理速度:二值图像处理算法通常简单高效,易于实现。
- 边缘检测:二值化可以方便地提取图像的边缘信息,这是很多图像分析算法的基础。
- 对比度增强:在某些图像上,二值化能增强前景和背景间的对比度,有助于突出关键特征。
二值化是图像处理流程中不可或缺的一步,尤其是在需要从图像中快速提取出有用信息的场景。
2.2 二值化的数学基础
2.2.1 阈值的数学定义
在数学上,二值化可以看作是应用一个阈值函数在每个像素上。对于灰度图像,假设灰度值范围为[0, 255],阈值(T)是一个介于这个范围内的值。二值化过程可以定义为:
[ f(x,y) =
\begin{cases}
255 & \text{if } g(x,y) \geq T \
0 & \text{if } g(x,y) < T
\end{cases}
]
其中,(g(x,y))表示原图像中像素点((x,y))的灰度值,(f(x,y))表示转换后的二值图像中对应像素点的值。
2.2.2 二值化算法的数学模型
二值化算法的数学模型涉及如何选择阈值(T)的问题。常见的方法有全局阈值法、自适应阈值法和Otsu方法等。
- 全局阈值法假设整个图像的光照是均匀的,选择一个固定的阈值应用于整个图像。
- 自适应阈值法则根据局部像素的统计特性来动态选择阈值,适用于光照不均匀的情况。
- Otsu方法则通过最大化类间方差来自动计算全局最优阈值,是一种自适应的全局阈值法。
接下来,我们将详细讨论二值化过程实现的步骤。
3. 二值化过程实现步骤
3.1 OV7725传感器图像采集
3.1.1 传感器的初始化与配置
为了使用OV7725图像传感器进行图像采集,首先需要进行初始化和配置。初始化过程包括设置传感器的时钟频率、像素格式、分辨率以及其他一些功能参数。通过I2C接口,可以对OV7725传感器内部的寄存器进行设置,从而控制传感器的工作模式和输出格式。
以下是使用C语言进行OV7725初始化配置的一个示例代码段及其说明。
// OV7725初始化函数示例
void OV7725_Init() {
// 设置传感器的I2C地址
uint8_t slaveAddress = 0x21; // OV7725的I2C地址
// 配置寄存器进行初始化
I2C_Write(slaveAddress, 0x12, 0x80); // 复位传感器
I2C_Write(slaveAddress, 0x12, 0x00); // 取消复位
I2C_Write(slaveAddress, 0x09, 0x05); // 设置分辨率及窗口
// 更多寄存器设置...
}
// I2C接口写函数
void I2C_Write(uint8_t slaveAddress, uint8_t reg, uint8_t value) {
// 通过I2C向指定寄存器写入数据
// 此处代码省略了I2C通信的具体实现细节
}
3.1.2 图像数据的获取过程
在传感器配置完成后,接下来是图像数据的获取过程。通常图像数据流是连续的,需要从传感器的输出接口按帧读取。根据OV7725的特性,图像数据可以通过并行或串行接口获取。在实际应用中,我们可能需要配置DMA(直接内存访问)来高效地将图像数据从传感器传输到内存中。
以下是一个简化的图像数据读取过程的伪代码:
// 伪代码,示意图像数据获取过程
while (1) {
// 检测是否有新的一帧图像数据
if (NewFrameAvailable()) {
// 从OV7725读取一帧图像数据
uint8_t* frameData = ReadFrameData();
// 对图像数据进行处理
ProcessImageData(frameData);
}
}
// 检测新帧数据函数
bool NewFrameAvailable() {
// 检测新数据的逻辑
// 此处代码省略了具体检测逻辑
}
// 读取一帧图像数据函数
uint8_t* ReadFrameData() {
// 读取图像数据的逻辑
// 此处代码省略了具体读取逻辑
}
3.2 基于OV7725的图像预处理
3.2.1 灰度化处理
从OV7725获取的数据通常是RGB格式的图像数据,二值化处理前需要将图像数据转换为灰度图像。灰度化过程简化了图像信息,只保留了亮度信息,这对于后续处理非常有用。
下面是一个将RGB图像转换为灰度图像的示例代码:
// RGB转灰度的函数
uint8_t RGBToGray(uint8_t r, uint8_t g, uint8_t b) {
// 使用加权平均法转换RGB到灰度
return (uint8_t)(0.299 * r + 0.587 * g + 0.114 * b);
}
// 将整个图像转换为灰度
void ConvertToGrayscale(uint8_t* rgbData, uint8_t* grayscaleData, int width, int height) {
for (int i = 0; i < width * height; i += 3) {
// 对每三个字节(RGB)进行灰度化处理
grayscaleData[i / 3] = RGBToGray(rgbData[i], rgbData[i + 1], rgbData[i + 2]);
}
}
3.2.2 噪声去除与平滑处理
为了获得更清晰的图像,通常需要对图像进行平滑处理以去除噪声。中值滤波是一种常用的去噪技术,它可以通过对邻近像素进行排序然后取中间值的方式来减少图像中的噪点。
下面是中值滤波处理的代码示例:
// 中值滤波函数
void MedianFilter(uint8_t* image, uint8_t* filteredImage, int width, int height) {
int windowSize = 3; // 3x3滤波窗口
int halfWindow = windowSize / 2;
for (int y = halfWindow; y < height - halfWindow; y++) {
for (int x = halfWindow; x < width - halfWindow; x++) {
// 对每个像素的周围进行排序和取中间值
uint8_t window[9];
int k = 0;
for (int i = -halfWindow; i <= halfWindow; i++) {
for (int j = -halfWindow; j <= halfWindow; j++) {
window[k++] = image[(y + i) * width + (x + j)];
}
}
// 对窗口内的值进行排序
sort(window, window + 9);
// 取中间值并赋值给滤波后的图像
filteredImage[y * width + x] = window[4];
}
}
}
3.3 二值化算法实现
3.3.1 阈值设定方法
在二值化处理中,选择合适的阈值是关键。通常有全局阈值和局部阈值两种设定方法。全局阈值适用于图像亮度均匀的情况,而局部阈值能够适应亮度不均匀的图像。
以下是确定全局阈值的一个简单方法:
// 计算灰度图像的全局阈值
uint8_t CalculateGlobalThreshold(uint8_t* grayscaleImage, int width, int height) {
uint32_t sum = 0;
int numPixels = width * height;
for (int i = 0; i < numPixels; i++) {
sum += grayscaleImage[i];
}
return (uint8_t)(sum / numPixels); // 平均灰度值作为阈值
}
3.3.2 二值化编程实现步骤
确定阈值后,可以编写函数进行二值化操作。每个像素的灰度值如果大于阈值,则设为白色(通常是255),否则设为黑色(通常是0)。
下面是二值化操作的代码示例:
// 二值化函数
void BinarizeImage(uint8_t* grayscaleImage, uint8_t* binaryImage, int width, int height, uint8_t threshold) {
for (int i = 0; i < width * height; i++) {
// 如果当前像素大于阈值,设为白色;否则设为黑色
binaryImage[i] = (grayscaleImage[i] > threshold) ? 255 : 0;
}
}
在实际的图像处理系统中,二值化算法的实现还需要考虑实时性能优化、抗噪性能提升等多方面因素。例如,可以利用并行计算或硬件加速来提高处理速度,或者采用更复杂的图像分析方法来处理光照不均匀等问题。二值化处理在OCR(光学字符识别)、图像分割、目标检测等应用场景中扮演着重要角色。
在下一章中,我们将进一步探讨动态阈值的优化策略,通过考虑环境光线变化以及基于反馈的动态调整机制来改进二值化过程,从而实现更加鲁棒和适应性强的图像处理系统。
4. 动态阈值优化策略
4.1 动态阈值的设定方法
4.1.1 环境光线变化的考虑
在图像二值化处理过程中,动态阈值的设定是一个关键技术点。环境光线的变化对图像的亮度和对比度有显著影响,从而影响二值化的效果。为了适应环境光线的变化,动态阈值技术应运而生。动态阈值可以根据实时采集到的图像信息,自动调整阈值,使图像二值化更加适应环境变化,提高图像处理的鲁棒性。
在动态阈值设定方法中,可以采用以下策略:
- 环境光线检测 :通过辅助的光线传感器或者利用图像预处理步骤中得到的图像特征来检测环境光线的变化情况。
- 阈值动态调整 :根据光线变化情况,实时调整二值化的阈值。这通常涉及到一个闭环控制算法,比如PID控制器,根据误差反馈调整阈值。
4.1.2 基于反馈的动态调整机制
动态调整机制的核心在于反馈控制。通过分析当前阈值产生的二值化结果,系统可以对阈值进行微调,以适应不断变化的环境。这种机制的关键是建立一个有效的反馈回路,以下是实现该机制的几个步骤:
- 收集反馈信息 :对二值化后的图像进行分析,提取特征,如目标区域的大小、形状、颜色分布等。
- 设计反馈函数 :根据收集到的信息设计一个函数,该函数可以定量表示当前阈值的合理性。
- 更新阈值 :利用反馈函数的结果来指导阈值的更新。可以使用简单的规则(如增加或减少一定的百分比),也可以使用更复杂的算法(如梯度下降法)。
4.2 动态阈值优化实验案例
4.2.1 实验环境与设备搭建
为了测试动态阈值优化策略的有效性,实验需要搭建一个能够模拟不同光照环境的测试平台。以下是实验环境与设备搭建的基本步骤:
- 实验室选择 :选择一个光照条件可控的室内环境。
- 光源设备 :准备一些可调光的灯光设备,以模拟不同的照明条件。
- OV7725传感器 :固定传感器在一个稳定平台上,确保图像采集的一致性。
- 数据记录设备 :使用计算机或其他记录设备来保存图像数据和处理结果。
实验环境布局示意代码块如下:
# 模拟环境设置代码示例
# 假设我们有一个环境类来模拟实验环境
class ExperimentEnvironment:
def __init__(self, light_conditions, camera_position):
self.light_conditions = light_conditions
self.camera_position = camera_position
def setup_lighting(self):
# 根据预设条件调整光源亮度
pass
def place_camera(self):
# 确定摄像头的位置和方向
pass
def capture_images(self):
# 捕获图像数据
pass
# 使用环境类搭建实验环境
env = ExperimentEnvironment(light_conditions=["low", "medium", "high"], camera_position="fixed")
env.setup_lighting()
env.place_camera()
images = env.capture_images()
4.2.2 实验结果分析与讨论
实验完成后,收集到的图像数据需要进行详细的分析,以此来评估动态阈值优化策略的实际效果。实验结果分析可以分为以下几个步骤:
- 图像质量评估 :使用图像处理软件或编程工具对二值化图像进行质量评估,比如对比度、清晰度等。
- 阈值变化分析 :记录实验过程中阈值的变化情况,以及对应的图像处理结果。
- 性能比较 :将动态阈值优化策略与静态阈值方法进行对比,评估其性能提升。
实验结果分析结果,可以使用以下表格进行展示:
| 实验条件 | 静态阈值二值化结果 | 动态阈值二值化结果 | 图像质量评分 |
|---|---|---|---|
| 低光照 | |||
| 中光照 | |||
| 高光照 |
通过对比表中的数据,可以直观地看出动态阈值优化策略相对于静态阈值的优势和不足,进一步指导参数调整和优化策略。
5. 多级阈值与Otsu二值化方法
5.1 多级阈值二值化原理
5.1.1 多级阈值的定义与应用
多级阈值二值化是一种通过多个阈值将图像分割成多个级别的方法,与传统的单一阈值二值化相比,它能提供更为丰富的图像信息,适用于对图像细节层次要求更高的场合。多级阈值二值化的关键在于如何确定阈值的选择及其分割效果。
在实际应用中,多级阈值可用于识别图像中的不同区域,如医学影像分析中的不同组织结构,或者在工业视觉检测中的不同材质识别。通过设置合适的阈值,可以更精确地分离出目标区域,减少误判。
5.1.2 多级阈值方法的优缺点分析
多级阈值方法的优点是能够提供更多的图像细节,并允许通过不同级别的阈值来适应复杂的图像分割需求。然而,它也存在一些缺点,主要表现在:
- 计算复杂度高 :随着阈值级别的增加,计算所需时间将指数级增长。
- 参数选择难度大 :阈值的选择依赖于特定场景,需要根据具体应用进行仔细调整。
- 适用性有限 :在某些情况下,图像中的噪声或光照变化可能导致阈值难以确定。
5.2 Otsu二值化方法详解
5.2.1 Otsu算法的原理
Otsu算法(又称最大类间方差法)是一种基于图像直方图的自动阈值确定方法。它通过遍历所有可能的阈值,并计算由该阈值分割的两个图像区域的类间方差来确定最佳阈值。类间方差最大的阈值通常被认为是最佳的分割阈值,因为它最大化了目标与背景之间的差异。
5.2.2 Otsu算法的实现步骤
以下是Otsu算法的基本实现步骤:
- 计算图像的直方图。
- 假设阈值为
t,将图像分为前景和背景两部分。 - 分别计算前景和背景的类内方差和总体均值。
- 计算类间方差,即类内方差之和除以类内均值之和。
- 遍历所有可能的阈值
t,找到使类间方差最大的t作为最佳阈值。
import numpy as np
from skimage import io
# 加载图像并转换为灰度
image = io.imread('path_to_image', as_gray=True)
# 计算直方图
histogram = np.bincount(image.ravel())
# 计算总平均、前景和背景的概率以及平均值
total = len(image)
total_foreground = sum(histogram)
background = histogram[0]
foreground = total - background
prob_foreground = foreground / total
prob_background = background / total
# 初始化最大类间方差和最佳阈值
max_variance = 0
best_threshold = 0
# 遍历所有阈值
for t in range(256):
# 计算前景和背景的累计直方图
cum_foreground = sum(histogram[:t])
cum_background = total - cum_foreground
if cum_foreground == 0 or cum_background == 0:
continue
# 计算类内方差
mean_foreground = np.sum(np.arange(t) * histogram[:t]) / cum_foreground
mean_background = np.sum(np.arange(t, 256) * histogram[t:]) / cum_background
# 计算当前阈值的类间方差
var_between = (prob_foreground * prob_background *
(mean_foreground - mean_background) ** 2)
# 更新最大类间方差和最佳阈值
if var_between > max_variance:
max_variance = var_between
best_threshold = t
print(f"Best threshold: {best_threshold}")
5.3 Otsu算法的优化与应用
5.3.1 算法参数的优化策略
Otsu算法虽然已经在很多场景下表现良好,但依旧可以通过一些优化策略来提升其性能:
- 动态阈值调整 :根据图像内容动态调整阈值范围,以适应不同光照条件。
- 多级Otsu方法 :将图像分割为多个区域,对每个区域独立执行Otsu算法。
- 后处理优化 :如使用形态学操作来清理分割结果,减少小的噪声区域。
5.3.2 Otsu算法在实际项目中的应用案例
在实际的图像处理项目中,Otsu算法经常被用于文档扫描、质量检测、图像分割等场景。例如,可以使用Otsu算法对扫描文档图像进行预处理,以清晰地分割出文字区域和背景。又如,在视觉检测系统中,Otsu算法可以帮助准确地识别产品表面的缺陷区域。
使用Otsu算法需要注意的是,它对图像质量有一定的要求。如果图像存在大量噪声,可能需要先进行去噪处理,再应用Otsu算法以获得较好的分割效果。此外,在实时处理要求较高的场合,需要考虑算法的运行时间,可能需要采用更为高效的分割策略。
通过以上方法的组合使用,可以针对不同图像的特点和处理需求,选取最合适的阈值二值化方法,以达到更好的图像处理效果。
简介:OV7725二值化是一种应用于图像预处理的常用技术,用于将摄像头捕获的图像数据转换为二值图像。本文深入探讨了OV7725传感器的特性、二值化的原理以及如何在实际应用中实现。OV7725传感器以其高质量视频捕获、低功耗和高灵敏度特性,在多个领域中得到广泛应用。文章概述了实现二值化处理的步骤,并介绍了在”LCD&OV7725”项目中的应用,展示了其在嵌入式系统中的实际价值。同时,提出了优化二值化效果的策略,如动态阈值、多级阈值和Otsu二值化方法。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









