



概念
- 原来指向main()的线程叫做主线程(main thread)
- 使用pthread_create()创建出来的线程,叫做子线程(child thread)
- 主/子线程只有在创建时才有区别, 创建完了就一视同仁, 都是一样的独立个体, 可以有交流、共享和私有, 但没有上下级, 这一点和多进程一样, 只有在创建的瞬间才有parent process 和child process 的区别, 创建完了就都是一样的独立个体
- 创建完子线程之后,两个线程之间独立运行,线程的执行先后次序由OS的调度算法决定
- 线程之间相互独立也相互影响,因为主线程结束时,会导致进程结束,进程结束时,会导致该进程的所有线程结束
- 多个线程共享一个进程, 而一个进程只有一个输出终端, So一定要调度好, 要不有的线程输出会看不到, 最low的做法就是sleep()一下保证线程可以执行完
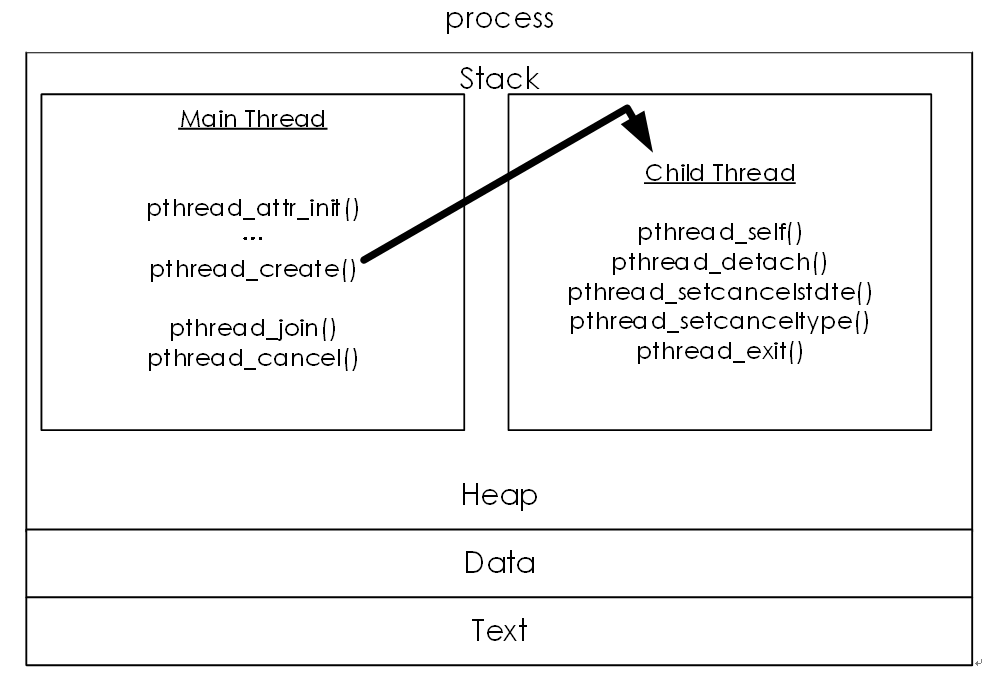
模型
$gcc -pthread
#include<pthread.h>
pthread_self()/pthread_equal() //获得ThreadID
pthread_attr_init()/pthread_attr_setdetachstate()/… //创建一个线程前设置
pthread_create() //创建一个线程
pthread_detach()pthread_setcancelstate()/pthread_setcanceltype() //已有一个线程后设置
pthread_kill() //向线程发送一个信号
pthread_exit() //退出线程但不退出进程
pthread_cancel() //终止另一个线程
pthread_join() //等待一个线程 pthread_self()
//返回调用线程的ID
pthread_t pthread_self(void);pthread_equal()
//对比两个线程ID,相等返回非0,不等返回0
int pthread_equal(pthread_t t1, pthread_t t2);pthread_attr_init()/ pthread_attr_destroy()
//pthread_attr_init()初始化一个线程属性对象attr,不指定attr就按默认参数进行初始化。
//pthread_attr_destroy()销毁一个线程属性对象,销毁的操作对使用这个attr的线程有影响
//成功返回0,失败返回error number
int pthread_attr_init(pthread_attr_t *attr);
int pthread_attr_destroy(pthread_attr_t *attr);更改attr对象的函数
//成功返回0,失败返回error number
typedef struct{
int detachstate; //线程的分离状态
int schedpolicy; //线程调度策略
struct sched_param schedparam; //线程的调度参数
int inheritsched; //线程的继承性
int scope; //线程的作用域
size_t guardsize; //线程栈末尾的警戒缓冲区大小
int stackaddr_set; //线程的栈设置
void * stackaddr; //线程栈的位置
size_t stacksize; //线程栈的大小
}pthread_attr_t;
pthread_attr_setdetachstate(pthread_attr_t* attr, int detachstate)
pthread_attr_getdetachstate(const pthread_attr_t* attr, int* detachstate)
PTHREAD_CREATE_JOINABLE / PTHREAD_CREAT_DETACHED
int detachstate;
pthread_attr_getdetachstate(&attr,&detachstate);
if(PTHREAD_CREATE_JOINABLE==detachstate)
printf("1.PTHREAD_CREATE_JOINABLE\n"); //default
pthread_attr_setschedpolicy(pthread_attr_t *attr, int policy);
pthread_attr_getschedpolicy(const pthread_attr_t *attr, int *policy);
SCHED_OTHER / SCHED_FIFO / SCHED_RR
pthread_attr_setsschedchedparam(pthread_attr_t *attr, const struct sched_param *param);
pthread_attr_getschedparam(const pthread_attr_t *attr, struct sched_param *param);
struct sched_param {
int sched_priority;// Scheduling priority,int sched_get_priority_max/sched_get_priority_min (int policy)
};
pthread_attr_setinheritsched(pthread_attr_t *attr, int inheritsched);
pthread_attr_getinheritsched(const pthread_attr_t *attr, int *inheritsched);
PTHREAD_INHERIT_SCHED / PTHREAD_EXPLICIT_SCHED
pthread_attr_setscope(pthread_attr_t *attr, int scope);
pthread_attr_getscope(const pthread_attr_t *attr, int *scope);
PTHREAD_SCOPE_SYSTEM / PTHREAD_SCOPE_PROCESS
pthread_attr_setguardsize ( pthread_attr_t *attr, size_t guardsize );
pthread_attr_getguardsize ( const pthread_attr_t *attr, size_t *guardsize );
>0 / 0
(默认1 page,当然还可以指定任意值)
pthread_attr_setstack(pthread_attr_t *attr, void *stackaddr, size_t stacksize);
pthread_attr_getstack(const pthread_attr_t *attr, void **stackaddr, size_t *stacksize);
pthread_attr_setstacksize ( pthread_attr_t *attr, size_t size );
pthread_attr_getstacksize ( const pthread_attr_t *attr, size_t *size );pthread_create()
//这个函数的create有‘e’ //p代表POSIX
//在调用进程中创建一个新的线程,新的线程通过激活start_routine()来开始执行,arg是start_routine()唯一的参数
//成功返回0,失败返回error number
int pthread_create(pthread_t *thread, const pthread_attr_t *attr, void *(*start_routine) (void *), void *arg);thread:存放新线程的ID到该参数所指向的缓冲区中, pthread_t是unsigned long int
attr: 线程的属性, 给NULL表示默认方式
start_routine:指定新线程的处理函数,也就是新线程启动之后需要执行的代码,线程处理函数执行完毕之后, 新线程终止
arg: 用于给start_routine传递实参(VS on_exit()) ,这个函数只支持传递void*型的型参,实际使用需要另外定义一个目标类型的指针,将arg强制类型转换后得到正确的类型
pthread_detach()
//将thread表示的线程标记为detached,当一个detached的线程结束后,它占用的资源被自动释放,其他线程也不能用pthread_join()等待
//detach一个已经被detach了的线程将导致不确定的结果
//成功返回0,失败返回error number
int pthread_detach(pthread_t thread);pthread_setcancelstate()
//设置当前线程是否允许被cancel,成功返回0,失败返回error number
int pthread_setcancelstate(int state, int *oldstate);state:设置新状态
- PTHREAD_CANCEL_ENABLE //允许取消
- PTHREAD_CANCEL_DISABLE //不允许取消
oldstate:用于带出设置之前的旧状态
pthread_setcanceltype()
//设置可取消性的类型,即当前线程何时被取消
//成功返回0,失败返回error number
int pthread_setcanceltype(int type, int *oldtype);type:设置新类型
- PTHREAD_CANCEL_DEFERED //延迟取消
- PTHREAD_CANCEL_ASYNCHRONOUS //立即取消
oldtype:用于带出设置之前的旧类型
pthread_exit()
//结束调用线程并返回一个retval值,这个值可以被同进程中的其他线程通过pthread_join()来读取,当然,前提条件是当前线程可以被汇合/等待
void pthread_exit(void *retval);线程的3种终止方式:
- 简单的从启动例程中返回,返回值是线程的退出码
- 线程可以被同一进程中的其他线程取消
- 线程调用pthread_exit()
pthread_cancel()
//发送一个结束请求给一个线程,是否取消以及何时取消取决于线程的属性:state和type
//成功返回0,失败返回error number
int pthread_cancel(pthread_t thread);pthread_join()
//等待thread指定的线程终止,如果目标线程没有终止,则当前线程进入阻塞状态,当目标线程终止时,该函数立即返回,前提:目标线程可以被汇合/等待
//如果调用pthread_join()的线程被cancel了,目标线程互保持joinable(不会被撤销)
//如果多个线程同时join一个线程,那么结果是不确定的
//成功返回0,失败返回error number
int pthread_join(pthread_t thread, void **retval);thread:线程编号
retval:二级指针的返回值
retval
- 不是NULL,将拷贝目标线程的状态信息到*retval
- 如果目标线程被cancel了,则将PTHREAD_CANCELED防止在*retval
例子
//02join.c, 使用pthread_join等待目标线程结束
#include<stdio.h>
#include<stdlib.h>
#include<pthread.h>
#include<string.h> //strerror()//没有这个.h会把strerror(error)当int
void* Calc(void* pv){
printf("primeter is %lg, area is:%lg\n",2*3.14**(int*)pv,3.14**(int*)pv**(int*)pv);
return NULL; //要求有返回值,所以返回NULL
}
main(){
int* piRadius=(int*)malloc(sizeof(int));
printf("please input radius\n");
scanf("%d",piRadius);
pthread_t thread;
int error=pthread_create(&thread,NULL,Calc,(void*)piRadius);
if(0!=error)
printf("%s\n",strerror(error)),exit(-1);
error=pthread_join(thread,NULL);
if(0!=error)
printf("%s\n",strerror(error)),exit(-1);
free(piRadius);
piRadius=NULL;
return 0;
}
//03join.c 使用pthread_join获取目标线程的退出状态
#include<stdio.h>
#include<stdlib.h>
#include<string.h>
#include<pthread.h>
void* task(void* pv){
char* pc="hello";
return (void*)pc;
}
main(){
//创建子线程,使用pthread_create
pthread_t thread;
int error=pthread_create(&thread,NULL,task,NULL);
if(0!=error)
printf("%s",strerror(error)),exit(-1);
//等待子线程结束,并获取退出状态信息
char* ps=NULL;
error=pthread_join(thread,(void**)&ps);
if(0!=error)
printf("pthread_join %s\n",strerror(error)),exit(-1);
printf("child thread returned:%s\n",ps);
return 0;
} //使用pthread_create()创建新线程
#include<stdio.h>
#include<stdlib.h>
#include<string.h>
#include<pthread.h>
void* task(void* pv){ //需要一个实参,我们又不需要,就可以给个NULL
//判断thread中的线程ID是否与pthread_self()的线程ID相等
int res=pthread_equal(*(pthread_t*)pv,pthread_self());
if(0!=res)
printf("these two are Equal\n");
else
printf("these two are Unequal\n");
int i=0;
for(i=0;i<10;i++){
printf("I am the new thread\n");
sleep(1);
}
}
int main(){
//1.准备存储线程编号的变量
pthread_t thread;
//2.创建新线程,使用pthread_create()
int errno=pthread_create(&thread,NULL,task,(void*)&thread);//子线程执行完task()就结束了,使用arg把thread传入子线程
if(0!=errno)
printf("pthread_create:%s\n",strerror(errno)),exit(-1);
sleep(10);
printf("child thread's ID:%lu,parent thread's ID:%lu\n",thread,pthread_self());//pthread_self(),获取当前线程自己的线程编号
return 0;
}//使用pthread_create()创建子线程,在线程处理函数中计算1~100之间的和,保存在sum中,返回该变量的地址,主线程等待子线程结束,并获取退出状态信息,并打印
#include<stdio.h>
#include<stdlib.h>
#include<string.h>
#include<pthread.h>
void* Sum(void* pv){
int i=0,sum=0;
for(i=1;i<=100;i++)
sum+=i;
printf("%d\n",sum);
return (void*)"success"; //其实return "success"就行
}
int main(){
pthread_t thread;
int res=pthread_create(&thread,NULL,Sum,NULL);
if(0!=res)
printf("%s",strerror(res)),exit(-1);
char *retval=NULL;
res=pthread_join(thread,(void**)&retval);
if(0!=res)
printf("%s\n",strerror(res)),exit(-1);
printf("child thread return : %s\n",retval);
return 0;
}//在线程处理函数中打印1~20之间的函数,当打印到10时终止当前进程并带出10,主线程等待并获取退出状态信息,打印最终结果
#include<stdio.h>
#include<pthread.h>
void* task(void* pv){
static int i=0;
for(i=1;i<=20;i++){
if(10==i)
pthread_exit((void*)&i); //pthread_exit() VS exit()
else
printf("i=%d\n",i);
}
return NULL;
}
main(){
pthread_t thread;
pthread_create(&thread,NULL,task,NULL);
int *retval=NULL;
pthread_join(thread,(void**)&retval); //没有错误处理
printf("task returned:%d\n",*retval);
return 0;
}//使用pthread_cancel()取消指定的线程
#include<stdio.h>
#include<stdlib.h>
#include<pthread.h>
void* task(void* pv){
pthread_setcancelstate(PTHREAD_CANCEL_DISABLE,NULL); //设置该线程不可取消
while(1){
printf("I am superman\n");
sleep(1);
}
return NULL;
}
void* task2(void* pv){
printf("Cancelling thread...\n");
sleep(2);
pthread_cancel(*(pthread_t*)pv);
printf("cancelling successfully\n");
}
main(){
pthread_t thread;
pthread_t thread2;
pthread_create(&thread,NULL,task,NULL);
pthread_create(&thread2,NULL,task2,(void*)&thread);
pthread_join(thread,NULL);
pthread_join(thread2,NULL);
return 0;
}
/*
I am superman
I am superman
Cancelling thread...
I am superman
cancelling successfully
I am superman //取消失败了, 说明设置禁止取消成功了
I am superman
*/

















 1265
1265

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









