






 博客提及独角兽企业招聘Python工程师,重点讲述导入小组及成员时,导入FeedItem涉及文件的情况。指出ContentDocument不支持insert,由SF内部在insert ContentVersion后自动产生,会丢失版本信息,还提到其ParentId对应ContentWorkspaceDoc。
博客提及独角兽企业招聘Python工程师,重点讲述导入小组及成员时,导入FeedItem涉及文件的情况。指出ContentDocument不支持insert,由SF内部在insert ContentVersion后自动产生,会丢失版本信息,还提到其ParentId对应ContentWorkspaceDoc。


- 导入小组
- 导入小组成员
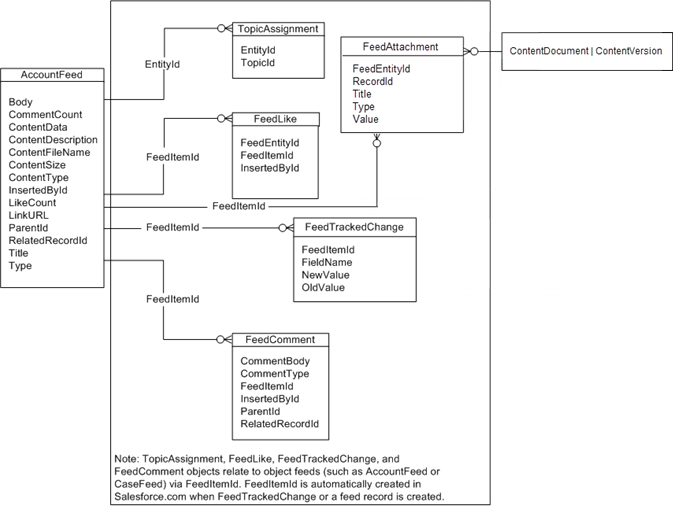
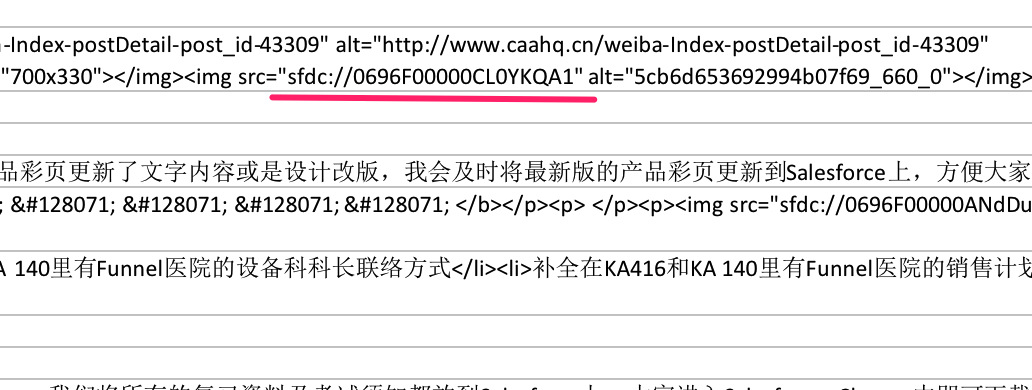
- 在导入FeedItem时,涉及到文件的地方有:Body:(sfdc://0696F00000CQaXOQA1) RELATEDRECORDID字
==ContentVersion:068(body) ContentDocument:069(RELATEDRECORDID)== 
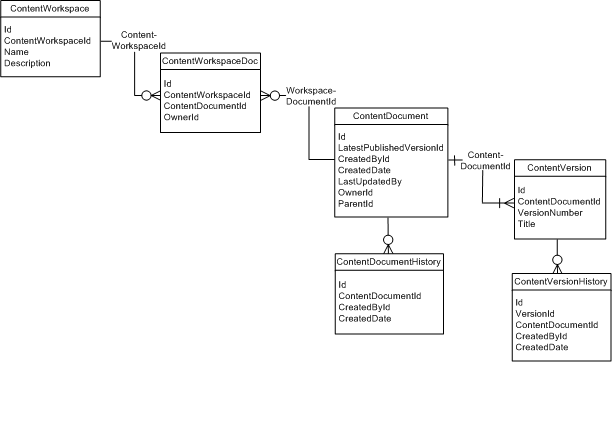
- ContentDocument 不支持insert,由此可知,他是由SF内部在insert ContentVersion后自动产生的,但会丢失版本信息
- feedItem --->FeedAttachment-->(ContentVersion/ContentDocument)
- 要看ContentDocument 的ParentId 对应着(0586F000000xtjCQAQ)ContentWorkspaceDoc
未完

















 7666
7666

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









