




 本文介绍了固定向下相机的手眼标定过程,通过HALCON算子演示了从标定板数据到转换关系的计算,探讨了仿射变换矩阵在平面上的作用,并提供了SVD求解的参考资料。
本文介绍了固定向下相机的手眼标定过程,通过HALCON算子演示了从标定板数据到转换关系的计算,探讨了仿射变换矩阵在平面上的作用,并提供了SVD求解的参考资料。
Hey 朋友,可以点击蓝字关注吗?
谢谢关注~
关于固定向下相机手眼标定的一些思考?
相机固定向下安装是手眼搭配中最简单的应用模式,也是大家最常用,最容易理解的一种方式。就让我们从这种简单的应用场景一起思考其中的一些奥妙吧。
— Edited By Hugo
/前言:在各种项目应用场景中,我们通常都是对着已有的公式输入原始数据,执行函数得出结果。得益于良好的封装性,函数里面发生了哪些事情却不太清楚,但有一些同学总是保留了良好的求知欲,殊不知,可能会发现一片更宽阔的知识海洋。/
# 1
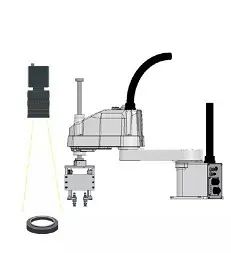
如上图所示:
要让机器人的手抓住杯子,就必须知道杯子跟手的相对位置关系,而杯子的位置则是通过机器人的眼睛看见的,所以,我们只需要知道机器人的手跟眼睛的转换关系,就可以随时抓取机器人眼睛所看到的物体了。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2908
2908

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









