






 本文介绍了Python中字典(dict)的使用方法及其高效的查找原理,对比了字典与列表(list)的不同之处,并讨论了不可变对象作为字典键的重要性。此外,还详细解释了集合(set)的概念和操作。
本文介绍了Python中字典(dict)的使用方法及其高效的查找原理,对比了字典与列表(list)的不同之处,并讨论了不可变对象作为字典键的重要性。此外,还详细解释了集合(set)的概念和操作。
dict
Python内置了字典:dict的支持,dict全称dictionary,在其他语言中也称为map,使用键-值(key-value)存储,具有极快的查找速度。
举个例子,假设要根据同学的名字查找对应的成绩,如果用list实现,需要两个list:
names = ['Michael', 'Bob', 'Tracy'] scores = [95, 75, 85]
给定一个名字,要查找对应的成绩,就先要在names中找到对应的位置,再从scores取出对应的成绩,list越长,耗时越长。
如果用dict实现,只需要一个“名字”-“成绩”的对照表,直接根据名字查找成绩,无论这个表有多大,查找速度都不会变慢。用Python写一个dict如下:
>>> d = {'Michael': 95, 'Bob': 75, 'Tracy': 85}
>>> d['Michael']
95
为什么dict查找速度这么快?因为dict的实现原理和查字典是一样的。假设字典包含了1万个汉字,我们要查某一个字,一个办法是把字典从第一页往后翻,直到找到我们想要的字为止,这种方法就是在list中查找元素的方法,list越大,查找越慢。
第二种方法是先在字典的索引表里(比如部首表)查这个字对应的页码,然后直接翻到该页,找到这个字。无论找哪个字,这种查找速度都非常快,不会随着字典大小的增加而变慢。
dict就是第二种实现方式,给定一个名字,比如'Michael',dict在内部就可以直接计算出Michael对应的存放成绩的“页码”,也就是95这个数字存放的内存地址,直接取出来,所以速度非常快。
你可以猜到,这种key-value存储方式,在放进去的时候,必须根据key算出value的存放位置,这样,取的时候才能根据key直接拿到value。
把数据放入dict的方法,除了初始化时指定外,还可以通过key放入:
>>> d['Adam'] = 67 >>> d['Adam'] 67
由于一个key只能对应一个value,所以,多次对一个key放入value,后面的值会把前面的值冲掉:
>>> d['Jack'] = 90 >>> d['Jack'] 90 >>> d['Jack'] = 88 >>> d['Jack'] 88
如果key不存在,dict就会报错:
>>> d['Thomas'] Traceback (most recent call last): File "<stdin>", line 1, in <module> KeyError: 'Thomas'
要避免key不存在的错误,有两种办法,一是通过in判断key是否存在:
>>> 'Thomas' in d False
二是通过dict提供的get()方法,如果key不存在,可以返回None,或者自己指定的value:
>>> d.get('Thomas') >>> d.get('Thomas', -1) -1
注意:返回None的时候Python的交互环境不显示结果。
要删除一个key,用pop(key)方法,对应的value也会从dict中删除:
>>> d.pop('Bob') 75 >>> d {'Michael': 95, 'Tracy': 85}
和list比较,dict有以下几个特点:
- 查找和插入的速度极快,不会随着key的增加而变慢;
- 需要占用大量的内存,内存浪费多。
而list相反:
- 查找和插入的时间随着元素的增加而增加;
- 占用空间小,浪费内存很少。
所以,dict是用空间来换取时间的一种方法。
dict可以用在需要高速查找的很多地方,在Python代码中几乎无处不在,正确使用dict非常重要,需要牢记的第一条就是dict的key必须是不可变对象。
这是因为dict根据key来计算value的存储位置,如果每次计算相同的key得出的结果不同,那dict内部就完全混乱了。这个通过key计算位置的算法称为哈希算法(Hash)。
要保证hash的正确性,作为key的对象就不能变。在Python中,字符串、整数等都是不可变的,因此,可以放心地作为key。而list是可变的,就不能作为key:
>>> key = [1, 2, 3] >>> d[key] = 'a list' Traceback (most recent call last): File "<stdin>", line 1, in <module> TypeError: unhashable type: 'list'
set
set和dict类似,也是一组key的集合,但不存储value。由于key不能重复,所以,在set中,没有重复的key。
要创建一个set,需要提供一个list作为输入集合:
>>> s = set([1, 2, 3]) >>> s {1, 2, 3}
注意,传入的参数[1, 2, 3]是一个list,而显示的{1, 2, 3}只是告诉你这个set内部有1,2,3这3个元素,显示的顺序也不表示set是有序的。。
重复元素在set中自动被过滤:
>>> s = set([1, 1, 2, 2, 3, 3]) >>> s {1, 2, 3}
通过add(key)方法可以添加元素到set中,可以重复添加,但不会有效果:
>>> s.add(4) >>> s {1, 2, 3, 4} >>> s.add(4) >>> s {1, 2, 3, 4}
通过remove(key)方法可以删除元素:
>>> s.remove(4) >>> s {1, 2, 3}
set可以看成数学意义上的无序和无重复元素的集合,因此,两个set可以做数学意义上的交集、并集等操作:
>>> s1 = set([1, 2, 3]) >>> s2 = set([2, 3, 4]) >>> s1 & s2 {2, 3} >>> s1 | s2 {1, 2, 3, 4}
set和dict的唯一区别仅在于没有存储对应的value,但是,set的原理和dict一样,所以,同样不可以放入可变对象,因为无法判断两个可变对象是否相等,也就无法保证set内部“不会有重复元素”。试试把list放入set,看看是否会报错。
注:
set=([1,2,3]), 其中([ ])只是set的表现形式,并不是把list放入set中。
若是写成 set=([ [1,2],[3,4],[5,6] ]),才算是把list放入set中。
再议不可变对象
上面我们讲了,str是不变对象,而list是可变对象。
对于可变对象,比如list,对list进行操作,list内部的内容是会变化的,比如:
>>> a = ['c', 'b', 'a'] >>> a.sort() >>> a ['a', 'b', 'c']
而对于不可变对象,比如str,对str进行操作呢:
>>> a = 'abc' >>> a.replace('a', 'A') 'Abc' >>> a 'abc'
虽然字符串有个replace()方法,也确实变出了'Abc',但变量a最后仍是'abc',应该怎么理解呢?
我们先把代码改成下面这样:
>>> a = 'abc' >>> b = a.replace('a', 'A') >>> b 'Abc' >>> a 'abc'
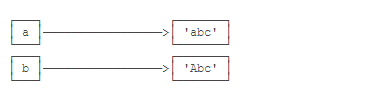
要始终牢记的是,a是变量,而'abc'才是字符串对象!有些时候,我们经常说,对象a的内容是'abc',但其实是指,a本身是一个变量,它指向的对象的内容才是'abc':

当我们调用a.replace('a', 'A')时,实际上调用方法replace是作用在字符串对象'abc'上的,而这个方法虽然名字叫replace,但却没有改变字符串'abc'的内容。相反,replace方法创建了一个新字符串'Abc'并返回,如果我们用变量b指向该新字符串,就容易理解了,变量a仍指向原有的字符串'abc',但变量b却指向新字符串'Abc'了:
所以,对于不变对象来说,调用对象自身的任意方法,也不会改变该对象自身的内容。相反,这些方法会创建新的对象并返回,这样,就保证了不可变对象本身永远是不可变的。
小结
使用key-value存储结构的dict在Python中非常有用,选择不可变对象作为key很重要,最常用的key是字符串。
tuple虽然是不变对象,但试试把(1, 2, 3)和(1, [2, 3])放入dict或set中,并解释结果。

















 3012
3012

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









