







 本文介绍了如何在ABB工业机器人上实现与相机的视觉通讯。内容包括使用套接字通讯功能,需要的616—1 PC Interface选项,以及详细的操作步骤,如创建套接字、连接、发送和接收数据。示例程序展示了如何建立客户端与服务器的连接,并通过TPWrite指令进行数据交互。此外,还提到了Socket调试工具和服务端设置。
本文介绍了如何在ABB工业机器人上实现与相机的视觉通讯。内容包括使用套接字通讯功能,需要的616—1 PC Interface选项,以及详细的操作步骤,如创建套接字、连接、发送和接收数据。示例程序展示了如何建立客户端与服务器的连接,并通过TPWrite指令进行数据交互。此外,还提到了Socket调试工具和服务端设置。
想知道多更多资料请关注东莞机器人之家公众号。
对于ABB工业机器人,如果需要使用套接字通讯功能,需订购其616—1 pc interface 系统选项。
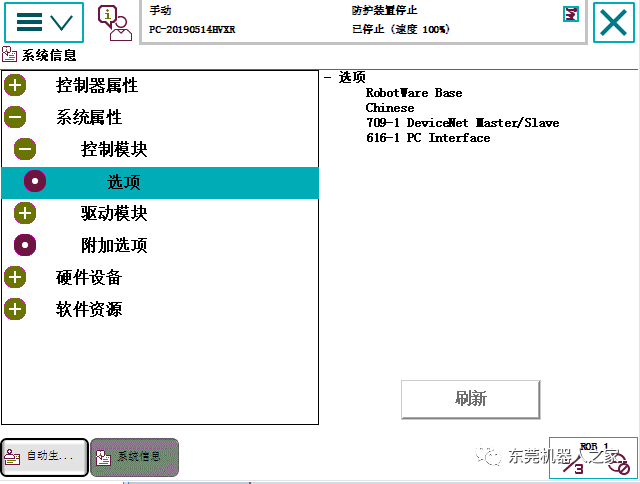
对于未配置该选项的机器人,无法使用套接字通讯功能。
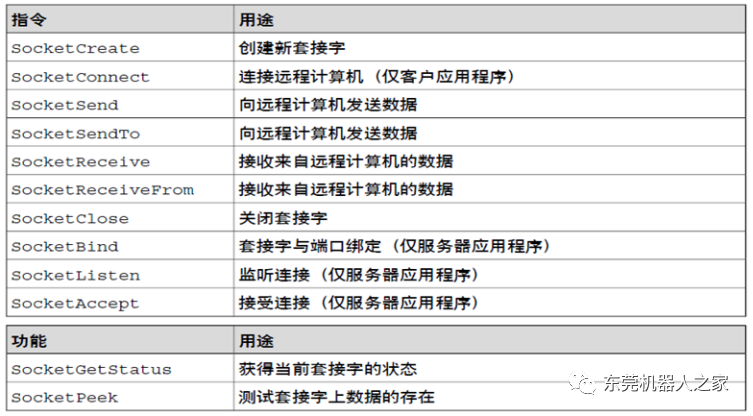
套接字通信所需的指令如下图:
机器人与相机视觉通讯一般机器人作为客户端client,相机作为服务端server。(也就是相机作主站,机器人作从站)
ABB机器人程序如下:
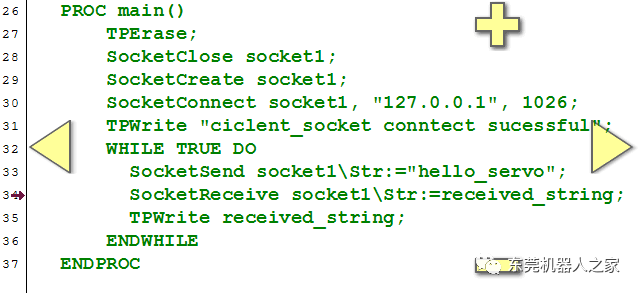
PROC main
想知道多更多资料请关注东莞机器人之家公众号。
对于ABB工业机器人,如果需要使用套接字通讯功能,需订购其616—1 pc interface 系统选项。
对于未配置该选项的机器人,无法使用套接字通讯功能。
套接字通信所需的指令如下图:
机器人与相机视觉通讯一般机器人作为客户端client,相机作为服务端server。(也就是相机作主站,机器人作从站)
ABB机器人程序如下:
PROC main
 1111
1361
1111
1361

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























