







简介:uCOS,也称为uC/OS,是一款专为微控制器设计的实时操作系统,以小型、高效率和良好的可移植性著称。文章详细解析了uCOS的核心部分,重点讨论了其在蓝牙4.0设备中的应用。uCOS源代码包括CPU初始化、核心功能实现以及API接口定义,支持任务管理、内存管理和时间管理。它还适用于低功耗蓝牙4.0设备,能够支持多任务环境并优化功耗。通过具体项目案例,如心率监测仪,展示uCOS在实际应用中的运作方式。uCOS的可移植性和中文注释降低了学习难度,使其成为嵌入式系统开发者的有力工具。 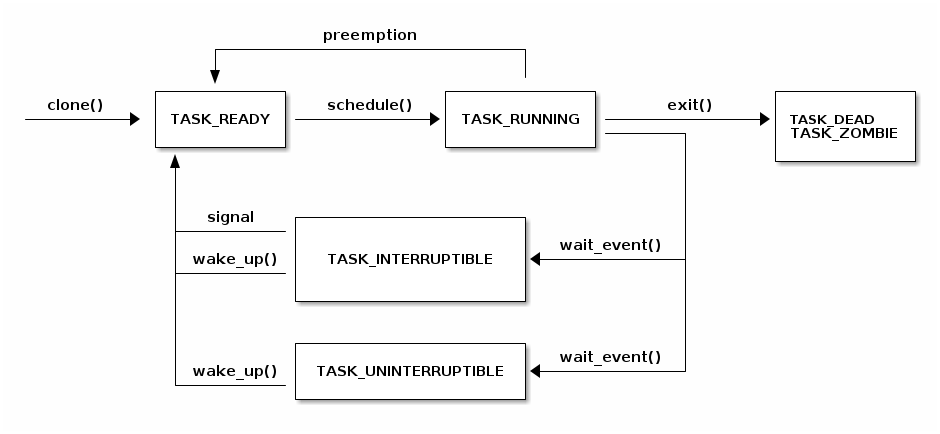
1. uCOS实时操作系统概述
1.1 uCOS的发展与特点
uCOS是一个开源的实时操作系统,由Jean J. Labrosse先生于1992年创建,旨在为嵌入式系统提供高效、轻量级的解决方案。历经多年的发展和更新,uCOS已经成为一个高度模块化和可移植的实时内核,广泛应用于工业控制、通信设备和消费电子产品等领域。
1.2 uCOS的内核功能
uCOS内核提供任务调度、时间管理、信号量、互斥量等多种功能,可支持多达255个优先级(uCOS-II)甚至更多(uCOS-III),这使得开发者可以根据任务的重要性和紧急程度安排不同的优先级,从而提高系统的响应能力和资源利用效率。
1.3 uCOS的应用场景
由于其高稳定性和高效性,uCOS在资源受限的微控制器上表现出色。它支持多任务并发执行,通过调度器合理分配CPU时间,保证系统的实时性和可靠性。uCOS的可裁剪性也使其在成本敏感的产品开发中备受欢迎。
在了解了uCOS实时操作系统的概述后,接下来我们将深入探讨它的核心组成部分,以便更进一步了解其工作原理。
2. uCOS核心组成部分解析
2.1 系统启动流程
2.1.1 启动代码的作用与设计
启动代码是操作系统启动时最先执行的代码片段,负责初始化硬件设备、设置内存空间、加载操作系统核心到内存等任务,为系统进入多任务环境做好准备。在uCOS系统中,启动代码通常用汇编语言编写,因为它直接操作硬件和CPU寄存器。
设计启动代码时,需要考虑以下几点: - 硬件依赖性 :需要明确了解目标硬件平台的特点,如CPU架构、内存映射等。 - 性能优化 :启动过程中应尽量减少对硬件资源的占用,缩短系统启动时间。 - 兼容性 :保证启动代码可以在不同版本或类型的目标硬件上正常工作。
2.1.2 启动过程中关键函数的调用机制
在uCOS中,启动代码通常会调用一系列初始化函数来逐步建立起整个系统的运行环境。这些函数按照执行顺序,大致可以分为以下几个阶段:
- 硬件初始化 :包括时钟设置、中断控制、I/O口初始化等。
- 堆栈初始化 :设置任务堆栈,为任务的运行提供必要的空间。
- 系统核心初始化 :初始化内核数据结构,如任务控制块、消息队列等。
- 多任务环境准备 :创建初始任务,配置调度器,准备进入多任务运行状态。
; 伪代码表示初始化过程
start:
call Hardware_Init ; 硬件初始化
call Stack_Init ; 堆栈初始化
call Kernel_Init ; 系统核心初始化
call Task_Environment_Ready ; 多任务环境准备
jump to Task_Scheduler ; 跳转到任务调度器,开始执行任务
2.2 uCOS内核结构
2.2.1 内核模块划分
uCOS的内核可以划分为几个主要模块: - 任务管理模块 :负责任务的创建、删除、挂起、恢复等。 - 时间管理模块 :提供系统时钟、定时器和时间延迟的功能。 - 内存管理模块 :负责系统的内存分配和回收。 - 事件管理模块 :处理事件标志、信号量、消息队列等同步和通信机制。
每个模块都有其特定的功能和接口,模块间通过定义好的API进行交互,使得整个内核具备高度的模块化。
2.2.2 内核数据结构和算法原理
uCOS的内核数据结构是实现操作系统功能的核心。比如: - 任务控制块(TCB) :存储任务状态信息和运行上下文。 - 消息队列 :实现任务间的通信机制。 - 信号量 :用于实现任务间的同步和互斥。
算法原理则涉及到任务调度算法,如轮转调度(Round-Robin)、优先级调度等,这些算法确保系统的高效和稳定运行。
// 任务控制块(TCB)的简化结构
struct TCB {
INT8U taskID; // 任务ID
void *stackBase; // 栈基指针
void *taskStackPtr; // 栈顶指针
INT8U taskState; // 任务状态
// 更多任务相关信息...
};
2.3 系统中断处理
2.3.1 中断向量表的作用与配置
中断向量表是系统中断处理的入口点集合,用于定义每个中断信号对应的中断服务例程(ISR)。当CPU接收到中断请求时,它会根据中断向量表跳转到相应的ISR执行中断处理。
中断向量表的配置通常在启动代码中完成,确保中断服务程序能准确快速地响应中断请求。
// 中断向量表结构示例
void (*interruptVectorTable[])(void) = {
// Reset处理程序
Reset_Handler,
// NMI处理程序
NMI_Handler,
// 通常中断处理程序...
Default_Handler,
// 其他中断处理程序...
};
2.3.2 中断服务程序的设计与实现
中断服务程序(ISR)是响应中断请求的处理程序,它必须尽可能短小精悍,保证中断响应的及时性。ISR的设计和实现需要注意以下几点: - 原子操作 :ISR中应避免使用需要多个CPU周期的操作,以避免中断嵌套。 - 上下文保存 :在处理中断时,需要保存当前任务的上下文,以便中断处理完成后能够恢复任务的执行。 - 状态标志 :通常ISR会设置一个标志位,通知主程序发生了某个事件,而具体的处理逻辑则放在主程序中。
// 中断服务程序示例
void ISR(void) {
// 保存当前任务状态
Save_Task_State();
// 执行中断处理逻辑
Handle_Interrupt();
// 恢复任务状态
Restore_Task_State();
}
以上章节介绍了uCOS操作系统核心部分的组成与工作原理。通过这些内容,我们可以对uCOS的启动流程、内核结构以及中断处理机制有更深入的理解。接下来的章节将深入探讨CPU初始化汇编代码的细节,为理解uCOS的底层运行机制奠定基础。
3. CPU初始化汇编代码
CPU初始化是系统启动过程中的重要步骤,它负责设置CPU的工作模式,初始化硬件资源,为操作系统和应用程序的运行创造条件。在嵌入式系统中,汇编语言是实现这些底层操作的首选语言,因为它提供了与硬件直接交互的能力。本章节将深入探讨CPU初始化过程中的汇编代码,包括基础的汇编语言知识和具体的初始化代码详解。
3.1 汇编语言基础
3.1.1 汇编指令集简介
汇编语言是与机器语言相对应的,它使用人类可读的助记符来表示机器指令。每一种CPU架构都有其对应的指令集。例如,ARM架构使用的是一种精简指令集(RISC),而x86架构则是复杂指令集(CISC)。汇编指令集通常包括数据传送、算术逻辑运算、程序控制、特殊处理等指令类别。
在嵌入式开发中,ARM架构因其高效率和灵活性被广泛采用。ARM汇编语言中的一些基础指令包括:
-
MOV:用于数据传送 -
ADD,SUB,MUL,DIV:基本的算术运算 -
CMP:比较操作 -
BL,B,BEQ,BNE:程序控制跳转指令
3.1.2 汇编与C语言的混合编程
嵌入式系统开发中,通常是将C语言与汇编语言结合起来使用。C语言能够提供更高的抽象,便于处理复杂的逻辑,而汇编语言则能够实现对硬件的精细控制。混合编程需要了解寄存器的使用、堆栈的管理以及函数调用和返回机制。
在混合编程时,通常的做法是将关键的性能瓶颈部分用汇编实现,而其他逻辑用C语言编写。在C函数中调用汇编语言函数时,需要注意参数传递和寄存器的保存与恢复规则。
3.2 初始化代码详解
3.2.1 CPU寄存器的初始化
在CPU启动时,寄存器的初始化是至关重要的。寄存器是CPU内部非常宝贵的资源,用于存储数据和地址,以及控制CPU的操作。初始化寄存器的目的是确保CPU开始执行时,所有的寄存器都处于一个确定的状态。
例如,在ARM架构中,通常需要将R0到R12寄存器清零,因为这些寄存器用于存储临时数据。程序计数器(PC)需要设置为启动代码的起始地址。状态寄存器(CPSR)需要根据需要设置CPU的模式和中断使能位。
LDR R0, =0x*** ; 将0赋值给R0寄存器
MOV R1, R0 ; 将R0的值复制给R1寄存器
; ... 持续对寄存器R0到R12进行初始化 ...
LDR R13, =stack_top ; 设置堆栈指针SP,指向堆栈的顶部
LDR R14, =start ; 将程序计数器PC设置为代码起始地址
start:
MRS R15, CPSR ; 读取当前状态寄存器的值
BIC R15, R15, #0x1F ; 清除模式位,设置为系统模式
MSR CPSR_c, R15 ; 更新状态寄存器,设置CPU为系统模式
3.2.2 栈的建立和初始化
栈是一种后进先出(LIFO)的数据结构,用于临时存储局部变量、函数参数、返回地址等。在汇编代码中,初始化栈意味着设置堆栈指针(SP)寄存器,使其指向栈内存的起始地址。
在初始化栈时,需要确保为所有可能的函数调用和中断处理预留足够的空间。以下是ARM架构下栈初始化的示例代码:
stack_top:
.space 0x800 ; 预留0x800字节的栈空间
LDR R13, =stack_top ; 将栈顶地址加载到SP寄存器中
在上面的示例中,预留了0x800字节的内存空间作为栈空间。通过将栈顶地址加载到SP寄存器中,CPU在进行函数调用和中断处理时,就会使用这块区域作为栈。
栈的初始化为操作系统的任务管理功能奠定了基础。在任务切换时,寄存器的保存和恢复操作将依赖于正确的栈配置。
本章节的深入解析为理解嵌入式系统启动的关键步骤提供了必要视角。CPU寄存器和栈的初始化是系统能够稳定运行的前提,而汇编语言与C语言的混合编程则展示了在底层硬件操作和高级逻辑处理之间实现平衡的必要性。通过具体的汇编代码和逻辑分析,本章为读者揭示了系统启动过程中,汇编语言在初始化CPU硬件方面所发挥的关键作用。
4. uCOS内核任务管理功能
4.1 任务的概念和状态
4.1.1 任务定义及状态转换
任务是uCOS实时操作系统中执行的基本单位,每个任务由一系列指令序列和必要的系统资源组成。任务有独立的执行路径和上下文,可以在多任务环境中并发执行。在uCOS系统中,任务可以被创建、删除、挂起、恢复和终止。任务的状态包括就绪、运行、挂起、被中断等。
任务的状态转换
任务的状态转换是任务管理的关键部分。在uCOS中,任务的状态变化遵循特定的规则:
- 就绪态(Ready) :任务已准备好运行,等待获得CPU时间。
- 运行态(Running) :任务正在CPU上执行。
- 挂起态(Suspended) :任务被延迟执行,等待某些条件满足后重新进入就绪态。
- 等待态(Waiting) :任务在等待某个事件发生。
状态转换通常由系统调度器自动管理,但也可能被任务显式地调用API进行控制,如挂起或恢复任务。
4.1.2 任务控制块的设计与管理
任务控制块(TCB)的结构
任务控制块(Task Control Block, TCB)是uCOS中用来管理任务信息的数据结构。每个任务都有一个对应的TCB,用于保存任务的状态、堆栈指针、任务优先级等重要信息。TCB是任务管理的核心,它的设计直接影响到系统的性能。
typedef struct os_tsk {
INT8U OSTCBStkPtr; /* Stack Pointer (SP) */
INT8U OSTCBDly; /* Task Delay Count */
INT8U *OSTCBStkBase; /* Stack Base Pointer */
INT8U OSTCBX; /* Index into the Stack (Low 8 bits) */
INT8U OSTCBBitX; /* Bit-X of the Stack */
INT8U OSTCBBitY; /* Bit-Y of the Stack */
INT8U *OSTCBY; /* Index into the Stack (High 8 bits) */
INT16U OSTCBId; /* Task Id */
void *OSTCBExtPtr; /* Pointer to external memory */
INT32U OSTCBStkSize; /* Stack Size */
INT8U OSTCBStat; /* Task Status */
INT8U OSTCBPrio; /* Task Priority */
OS_TCB *OSTCBNext; /* Pointer to next TCB */
OS_TCB *OSTCBPrev; /* Pointer to previous TCB */
OS_TCB OSTCBEventPtr; /* Pointer to event control block */
} OS_TCB;
任务控制块管理
TCB的管理涉及任务的创建、删除、调度等操作。操作系统维护一个TCB列表,以便快速访问所有任务的状态信息。创建任务时,TCB被初始化,当任务结束时,其TCB将被释放。
任务创建函数 OSTaskCreate() 在uCOS中用于初始化TCB,分配堆栈空间,并将任务置于就绪队列中。任务删除函数 OSTaskDel() 则移除任务的TCB,并释放其资源。
4.2 任务调度策略
4.2.1 调度算法的选择与实现
任务调度是实时操作系统中管理多个并发任务执行的核心机制。uCOS采用基于优先级的抢占式调度算法,确保具有最高优先级的就绪任务能够获得CPU的控制权。
调度算法的实现
调度器需要判断是否有更高优先级的任务处于就绪态,如果有,当前任务将被迫挂起,控制权转移到新的任务。这个过程涉及到对任务优先级队列的管理,这通常采用二叉堆( binary heap )或其他优先级队列的数据结构来实现。
在uCOS中, OSTimeTick() 函数是系统时钟中断服务程序,它会周期性地被调用,并触发调度器检查是否需要进行任务切换。代码片段如下:
void OSTimeTick(void) {
OS_TCB *ptcb;
OS_CPU_SR cpu_sr;
OS_ENTER_CRITICAL();
if (OSTimeTickRdy != (INT8U)0) {
OSTimeTickRdy--;
}
OS_EXIT_CRITICAL();
ptcb = OSPrioGet(0u);
if (ptcb != (OS_TCB *)0) {
OSIntCtxSw();
}
}
在这段代码中, OSPrioGet(0u) 用于获取当前最高优先级的任务TCB指针,然后检查是否有需要进行任务切换的标志,如果有则触发上下文切换。
4.2.2 优先级管理与调度优化
优先级反转
在实际应用中,优先级管理需要注意优先级反转的问题。当高优先级任务因等待低优先级任务释放资源而阻塞时,如果此时出现一个中等优先级的任务,会导致高优先级任务长时间等待。uCOS提供了优先级继承机制来解决这一问题。
调度优化
对于调度策略的优化,uCOS提供了一些机制来减少上下文切换的开销,例如,当低优先级任务执行完毕,调度器会检查是否有更高优先级的任务就绪,然后决定是否立即进行任务切换。这可以通过优化就绪队列的管理来实现,以避免不必要的任务切换。
调度器还允许任务在进入等待状态时指定一个超时时间,这样任务在未得到预期资源时不会无限期地阻塞,而是会超时后返回就绪队列,从而获得再次运行的机会。
通过这些调度优化策略,uCOS提供了一个高效的任务调度机制,确保实时系统对时间的严格要求得以满足。
5. uCOS内存管理功能
5.1 内存管理的需求分析
5.1.1 动态内存分配的必要性
实时操作系统(RTOS)如uCOS,面对的是资源受限的嵌入式环境,它们需要在有限的资源下高效地运行。在这样的环境下,内存管理尤其重要。动态内存分配的必要性主要体现在以下几点:
- 资源受限环境下的优化: 在嵌入式系统中,内存资源相对有限,需要通过动态内存管理来实现内存的最优分配和回收。
- 运行时配置: 在系统运行过程中,可能需要根据应用的不同阶段动态地分配内存,例如存储数据、运行时创建临时变量等。
- 数据大小未知: 对于一些数据结构,其大小在编译时无法确定,需要在运行时根据实际需求动态分配。
- 内存池提升效率: 使用内存池可以在保证快速响应的同时,减少内存碎片的产生。
动态内存分配是现代操作系统不可或缺的一部分,对于嵌入式实时系统而言,有效的内存管理策略能够提升系统的实时性、稳定性和资源利用率。
5.1.2 内存碎片问题与解决方法
内存碎片问题是动态内存分配过程中常见的问题,主要表现为内存空间的浪费。它主要分为内部碎片和外部碎片:
- 内部碎片: 当分配的内存块大小超过实际所需大小时产生的浪费。
- 外部碎片: 未使用的小内存块散布在内存中,无法被有效利用。
为了解决内存碎片问题,uCOS提供了内存池的管理机制。内存池是一种预先分配和管理内存块的方法,它将内存分割成固定大小的块,并通过特定的数据结构进行管理。这种方式简化了内存分配和回收的过程,能够减少碎片的产生。
5.2 内存管理的实现机制
5.2.1 内存池的概念与应用
内存池是一种高效的内存管理方式,在RTOS中尤为常见。其基本概念是预分配一块较大的内存区域,然后将它划分成许多固定大小的小块,这些小块可以被不同的任务用于内存分配。
内存池的设计提供了以下优势:
- 减少内存碎片: 由于每个内存块大小固定,因此几乎不会产生外部碎片,内部碎片也非常有限。
- 提高分配效率: 分配和回收内存的效率更高,因为它只需要在内存池的管理数据结构中操作。
- 预测性能: 系统的内存使用情况更加可预测,对于实时性要求极高的系统而言这一点至关重要。
内存池的实现通常需要考虑内存块的管理策略,比如链表、位图等。在uCOS中,内存池的实现需要编写相应的管理代码,包括内存块的初始化、分配、回收等功能。
5.2.2 内存分配和释放的策略
在uCOS中,内存的分配和释放策略是内存管理的关键。为了确保内存管理的高效性,uCOS采用了几种策略来优化这些过程:
- 静态分配策略: 在系统初始化时为每个任务或系统功能预留固定大小的内存空间,这种方法简单且不会产生碎片,但内存使用效率较低。
- 动态分配策略: 根据需要在运行时分配和回收内存,这种方式内存使用更加灵活,但需要精心设计内存管理策略来防止碎片化。
- 内存池策略: 通过固定大小的内存块组成内存池,优化分配速度并减少碎片。
这些策略不是孤立的,根据不同的应用场景,可能需要灵活组合使用。同时,内存分配和释放操作需要考虑线程安全和优先级管理,确保RTOS的稳定性和实时性。
在实际应用中,开发者应根据具体需求和系统资源来选择合适的内存管理策略。通过合理的内存管理,可以有效提高系统的性能和稳定性。
6. uCOS时间管理功能
在实时操作系统中,时间管理是至关重要的部分,它直接关系到系统的实时性和可靠性。uCOS提供了灵活而强大的时间管理功能,使系统能够以精确的时序执行任务,以满足实时应用的需求。
6.1 时间管理的理论基础
6.1.1 时间片与时间基准的概念
时间片是指操作系统在进行多任务调度时,每次分配给任务执行的时间段。时间片的大小决定了任务切换的频繁程度,从而影响系统的响应时间。时间基准,又称为系统时钟或滴答(tick),是uCOS系统中用来度量时间的基本单位,以固定频率的中断服务程序来实现。
在uCOS中,时间基准通常是硬件定时器中断的频率,它触发一个周期性的事件,使操作系统能够更新系统时间,并检查是否有需要调度的任务。
6.1.2 实时系统中的时间管理方法
实时系统的时间管理方法包括以下几种:
- 时钟节拍管理 :设置一个时间基准,通常是硬件定时器中断,每个时钟节拍产生一个中断信号,使得操作系统能够周期性地执行某些操作。
- 绝对时间和相对时间 :在uCOS中,可以使用相对时间进行延时操作,也可以使用绝对时间进行任务或定时器的设置,以便在特定的时间点触发事件。
- 超时机制 :为任务或资源的等待操作设置超时时间,以避免死锁情况的发生。
6.2 时间管理的实践技巧
6.2.1 系统时钟的配置与使用
在uCOS中配置系统时钟,首先需要设置系统滴答定时器的频率。这通常在系统启动代码中完成,可以通过修改相应的寄存器来配置定时器。一旦配置完成,操作系统就可以利用这个时钟节拍来跟踪系统时间,并进行任务调度。
void OSStartHighRdy(void)
{
// 设置系统滴答定时器的频率
SetSysTickFrequency(1000); // 假设设置为1000Hz
// 启动系统滴答定时器
StartSysTick();
// 调度最高优先级的任务
OSCtxSw();
}
代码解释: - SetSysTickFrequency 函数设置系统滴答定时器的频率。 - StartSysTick 函数启动系统滴答定时器。 - OSCtxSw 函数实现任务的上下文切换。
6.2.2 定时器和延时操作的实现
uCOS提供了定时器管理功能,允许创建多个定时器对象,并以绝对或相对时间来设置它们。这些定时器可以用于任务延时,也可以用于周期性执行某些功能。
void StartDelayTask(void *p_arg)
{
int32_t ticks;
OS_TICK os_ticks;
(void)p_arg;
while (DEF_ON)
{
// 计算延时
ticks = (OS_TICK)(1000 / OSCfg_TmrTaskRateHz);
// 延时操作
OSTimeDly(ticks);
// 定时器任务执行代码
// ...
}
}
代码解释: - OSTimeDly 函数用于实现任务延时, ticks 表示延时的时钟节拍数。 - OSCfg_TmrTaskRateHz 表示定时器任务的执行频率。
定时器的使用包括创建定时器对象、启动定时器、停止定时器和删除定时器等操作。这些操作允许开发者将定时器与特定任务关联,以实现复杂的时序控制逻辑。
在实际应用中,合理利用uCOS的时间管理功能,可以有效地提升系统的实时性能和任务调度效率,满足不同实时应用场合的需求。
简介:uCOS,也称为uC/OS,是一款专为微控制器设计的实时操作系统,以小型、高效率和良好的可移植性著称。文章详细解析了uCOS的核心部分,重点讨论了其在蓝牙4.0设备中的应用。uCOS源代码包括CPU初始化、核心功能实现以及API接口定义,支持任务管理、内存管理和时间管理。它还适用于低功耗蓝牙4.0设备,能够支持多任务环境并优化功耗。通过具体项目案例,如心率监测仪,展示uCOS在实际应用中的运作方式。uCOS的可移植性和中文注释降低了学习难度,使其成为嵌入式系统开发者的有力工具。

















 4837
4837

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









