






1. 核心概念
(1) 什么是轮廓?
- 定义:图像中连续像素点的闭环,用于描述物体形状边界
- 与边缘的区别:
特征 轮廓(Contour) 边缘(Edge) 连续性 闭合或开放的区域边界 单像素宽度、可能存在断裂 数据结构 按顺序存储的点的集合 二值化的梯度响应图像 应用场景 物体计数、形状分析 初步定位物体位置
(2) 典型应用场景
- 工业检测:计算零件尺寸、检测形状完整性
- 自动驾驶:识别道路边界、车道线
- 生物医学:细胞计数、病灶区域标记
2. 轮廓提取流程
核心步骤:
- 预处理:去噪 + 二值化 → 减少干扰
- 轮廓发现:通过边界追踪算法提取轮廓
- 轮廓筛选:根据面积、长宽比等过滤无用轮廓
- 可视化与分析:绘制轮廓、提取几何特征
3. 应用实例:交互式轮廓筛选工具
import cv2
import numpy as np
def update_threshold(val):
# 动态调整面积阈值
min_area = cv2.getTrackbarPos("Min Area", "Contour Demo")
# 重新提取并绘制轮廓
display = img.copy()
for cnt in contours:
if cv2.contourArea(cnt) > min_area:
cv2.drawContours(display, [cnt], -1, (0, 255, 0), 2)
cv2.imshow("Contour Demo", display)
# 初始化
try:
# 读取图像
img_path = "8.tif"
img = cv2.imread(img_path)
# 检查图像是否成功读取
if img is None:
print(f"无法读取图像,请检查文件路径 '{img_path}' 是否正确。")
else:
# 预处理步骤生成 contours
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 高斯模糊以减少噪声
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
# 二值化处理
_, binary = cv2.threshold(blurred, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
# 查找轮廓
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 创建窗口和滑动条
cv2.namedWindow("Contour Demo")
cv2.createTrackbar("Min Area", "Contour Demo", 10, 5000, update_threshold)
# 初始显示
update_threshold(0)
# 等待用户按下任意键
cv2.waitKey(0)
# 关闭所有 OpenCV 窗口
cv2.destroyAllWindows()
except Exception as e:
print(f"发生错误: {e}")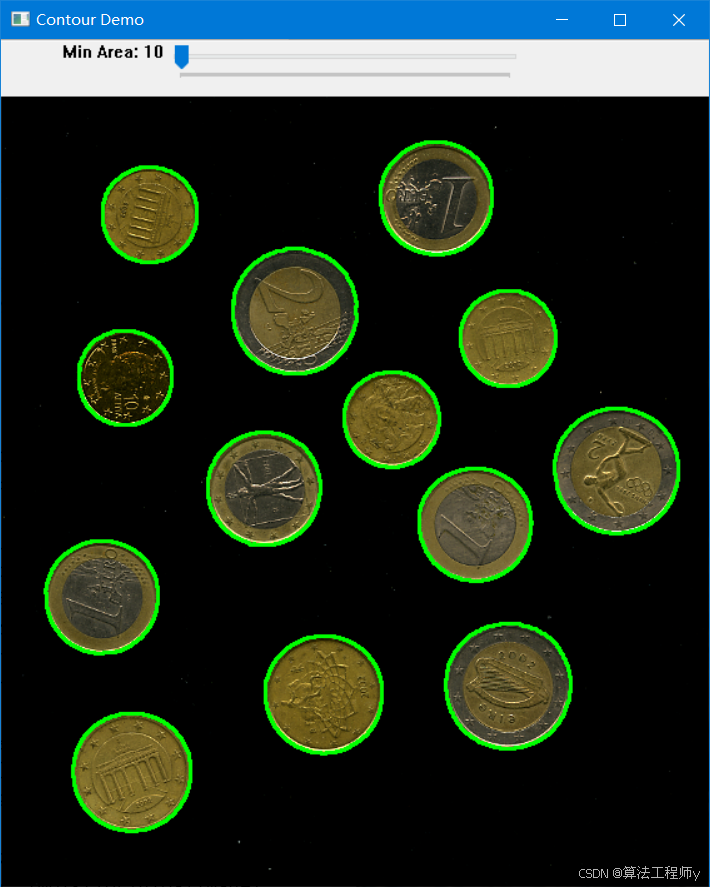
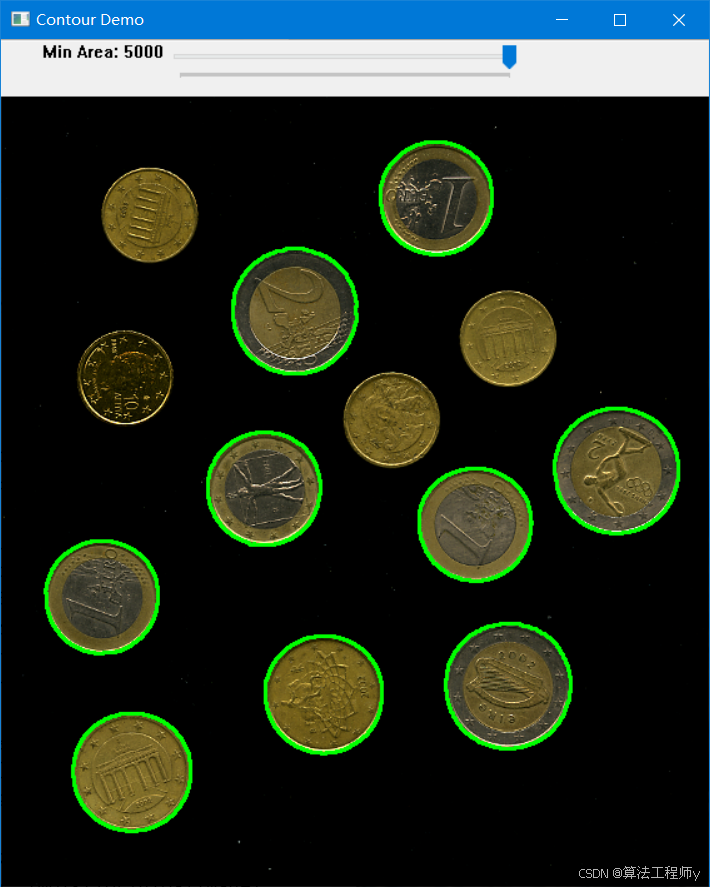
交互功能:
- 滑动条实时过滤小于设定面积的轮廓
- 显示符合条件的主要物体轮廓
6. 常见问题与解决方案
| 问题现象 | 可能原因 | 解决办法 |
|---|---|---|
| 无法提取目标轮廓 | 预处理阈值过高/过低 | 调整二值化参数,增加形态学操作 |
| 轮廓断裂不连续 | 光照不均匀/噪声干扰 | 改进去噪,使用闭运算闭合边缘 |
| 提取到过多细小轮廓 | 未过滤小面积区域 | 添加面积/周长筛选项 |
7. 性能优化技巧
- 图像金字塔:对高分辨率图像进行降采样加速处理
- ROI区域裁剪:仅处理感兴趣区域
- 并行计算:使用多线程处理多个轮廓
8. 结论
- 预处理是核心:高质量的二值化直接决定轮廓提取结果
- 层次化分析:使用
RETR_TREE处理嵌套轮廓(如俄罗斯套娃)

















 2563
2563

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









