






图像噪声是数字化过程中不可避免的干扰因素,会导致图像质量下降、细节模糊。本文将介绍 图像噪声的常见类型,并详解 均值滤波、中值滤波、高斯滤波 的原理、适用场景及 MATLAB 实现方法。
1. 图像噪声类型及数学模型
图像噪声可分为 加性噪声 和 乘性噪声,常见类型如下:
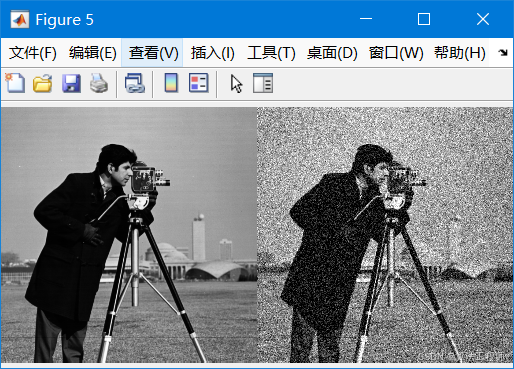
1.1 高斯噪声(Gaussian Noise)
- 特点:噪声幅度服从正态分布,呈“雪花点”效果。
- 数学模型:
 ,其中, 为均值(通常为0), 为标准差(控制噪声强度)。
,其中, 为均值(通常为0), 为标准差(控制噪声强度)。 - 应用场景:传感器噪声、低光照环境成像。
img = imread('cameraman.tif');
noisy_img = imnoise(img, 'gaussian', 0, 0.02); % 添加均值为0、方差0.02的高斯噪声
imshowpair(img, noisy_img, 'montage');
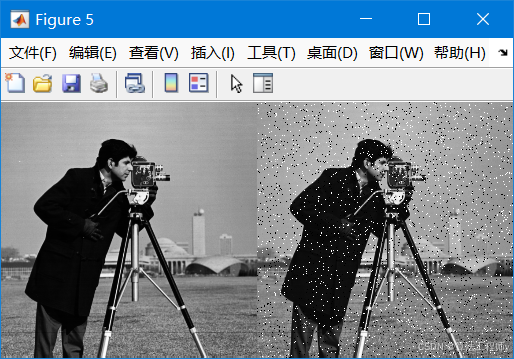
1.2 椒盐噪声(Salt & Pepper Noise)
- 特点:随机出现的黑白像素点(椒=黑色,盐=白色),密度由噪声概率控制。
- 模型:像素值取0或255的脉冲干扰。
- 常见原因:传感器故障、信号传输丢包。
MATLAB生成椒盐噪声:
noisy_img = imnoise(img, 'salt & pepper', 0.05); % 噪声密度5%
1.3 泊松噪声(Poisson Noise)
- 特点:光子计数噪声,符合泊松分布,与信号强度相关。
- 应用场景:医学成像、天文摄影。
- MATLAB生成:默认在
imnoise中调用泊松噪声时需直接应用算法。
2. 图像滤波方法详解
图像滤波通过空域或频域操作抑制噪声,核心是权衡 去噪效果 与 细节保留。
2.1 均值滤波(Mean Filter)
- 原理:用邻域像素的平均值替代中心像素值。
- 优点:算法简单,抑制高斯噪声效果较好。
- 缺点:模糊图像边缘,无法滤除椒盐噪声。
MATLAB实现(3×3滤波器):
kernel_size = 3;
mean_filter = fspecial('average', kernel_size);
filtered_img = imfilter(noisy_img, mean_filter, 'replicate');
figure; imshow(filtered_img);
2.2 中值滤波(Median Filter)
- 原理:取邻域像素的中值,而非平均值。
- 优点:有效去除椒盐噪声,保留边缘锐度。
- 缺点:窗口大时可能导致细节损失。
MATLAB实现(3×3窗口):
filtered_median = medfilt2(noisy_img, [3 3]);
figure; imshow(filtered_median);
2.3 高斯滤波(Gaussian Filter)
- 原理:基于高斯函数的加权平均,中心权重高,边缘权重低。
- 优点:平滑噪声同时保留边缘(减少振铃效应),适用于高斯噪声。
- 缺点:对椒盐噪声效果较差。
MATLAB实现(标准差σ=1,窗口大小5×5):
sigma = 1;
gauss_filter = fspecial('gaussian', 5, sigma);
filtered_gauss = imfilter(noisy_img, gauss_filter, 'symmetric');
figure; imshow(filtered_gauss);
3. 滤波效果对比实验
实验步骤:
- 对图像添加高斯噪声和椒盐噪声。
- 分别用三种滤波方法处理,对比结果。
代码示例:
% 生成噪声图像
img = im2double(imread('刘亦菲.jpg'));
img=rgb2gray(img);
gaussian_noise = imnoise(img, 'gaussian', 0, 0.03);
salt_pepper_noise = imnoise(img, 'salt & pepper', 0.04);
% 均值滤波
filtered_mean = imfilter(gaussian_noise, fspecial('average', 3));
% 中值滤波(针对椒盐噪声)
filtered_median = medfilt2(salt_pepper_noise, [3 3]);
% 高斯滤波
filtered_gauss = imgaussfilt(gaussian_noise, 1); % 使用内置函数简化
% 显示结果
figure
montage({gaussian_noise, filtered_mean, filtered_gauss}, 'Size', [1 3]);
title('高斯噪声(左) - 均值滤波(中) - 高斯滤波(右)');
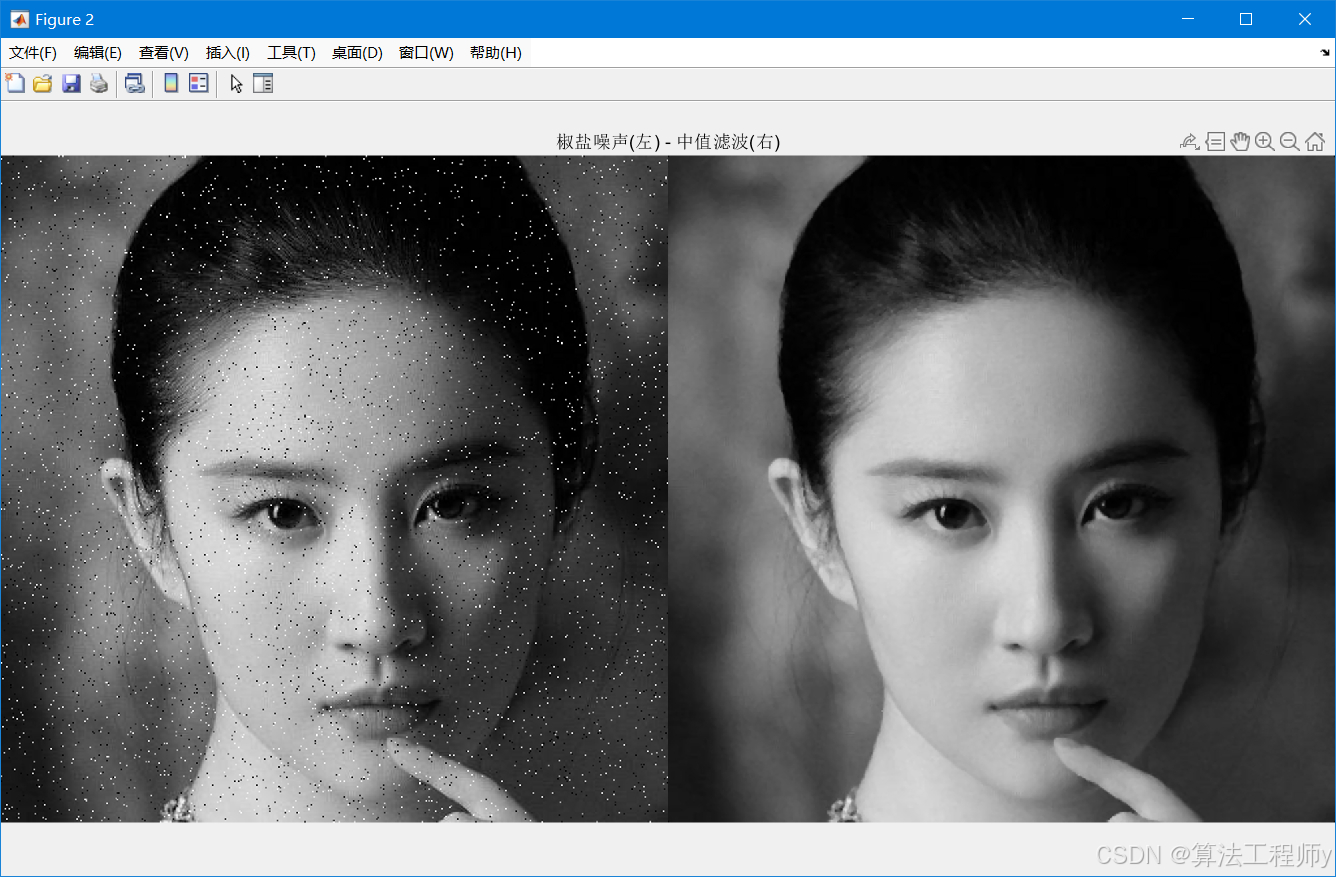
figure
montage({salt_pepper_noise, filtered_median}, 'Size', [1 2]);
title('椒盐噪声(左) - 中值滤波(右)');

4. 实际应用与参数选择技巧
4.1 窗口大小选择
- 均值/中值滤波:窗口越大,去噪效果越强,但越模糊。
- 高斯滤波:窗口大小需与 匹配,窗口尺寸通常为 。
经验值:
- 轻度噪声:3×3 窗口
- 重度噪声:5×5 至 7×7 窗口
4.2 滤波器参数优化
- 高斯滤波: 控制平滑程度, 越大,图像越模糊。
- 中值滤波:多通道图像需分通道处理(RGB图像适用
medfilt3)。
5. 常见问题与优化方法
问题1:边缘区域滤波后出现黑边
- 原因:滤波时未处理边界像素,默认用0填充。
- 解决:设置
imfilter的边界选项为'symmetric'或'replicate':filtered_img = imfilter(img, kernel, 'replicate');
问题2:滤波后图像模糊
- 优化方法:
- 自适应滤波(如 Wiener 滤波)结合噪声模型。
- 非局部均值滤波(NL-Means,适合复杂噪声)。
问题3:彩色图像滤波颜色失真
- 处理方法:拆分RGB通道分别滤波:
R = medfilt2(img(:,:,1), [3 3]); G = medfilt2(img(:,:,2), [3 3]); B = medfilt2(img(:,:,3), [3 3]); filtered_rgb = cat(3, R, G, B);
总结
| 滤波方法 | 适用噪声类型 | 核心优势 | MATLAB核心函数 |
|---|---|---|---|
| 均值滤波 | 高斯噪声、均匀噪声 | 算法简单 | fspecial('average') |
| 中值滤波 | 椒盐噪声、脉冲噪声 | 保留边缘 | medfilt2 |
| 高斯滤波 | 高斯噪声、微弱噪声 | 平滑性强、可控模糊 | fspecial('gaussian') |
选择合适的滤波算法需综合考虑 噪声类型、计算效率 和 细节保留需求。

















 9831
9831

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









