







 本文介绍了优化方法中的信赖域方法,对比线搜索方法,详细阐述了Cauchy Point和Dogleg策略。Cauchy Point作为最速下降法在信赖域中的应用,而Dogleg方法提供了更优的步长近似,有效解决了信赖域内极小值的计算问题。
本文介绍了优化方法中的信赖域方法,对比线搜索方法,详细阐述了Cauchy Point和Dogleg策略。Cauchy Point作为最速下降法在信赖域中的应用,而Dogleg方法提供了更优的步长近似,有效解决了信赖域内极小值的计算问题。
信赖域(一):Cauchy Point与Dogleg
王金戈
从本文开始介绍优化方法的另一大类——信赖域方法。
基本思想
先回顾一下前面几篇文章介绍过的线搜索方法。在线搜索方法的每次迭代中,先确定一个搜索方向,然后沿着该方向寻找一个最佳的步长,使得目标函数在该步长下降得最多。如此迭代下去,直到满足收敛所需的条件。在确定搜索方向时,一般选择梯度下降方向或牛顿方向(即二阶近似的极小值方向)。搜索步长时,一般采用回溯法或back-and-forth方法。
信赖域方法的思路有所不同。在信赖域方法的每次迭代中,先确定一个信赖域半径,然后在该半径内计算目标函数的二阶近似的极小值。如果该极小值使得目标函数取得了充分的下降,则进入下一个迭代,并扩大信赖域半径,如果该极小值不能令目标函数取得充分的下降,则说明当前信赖域区域内的二阶近似不够可靠,需要缩小信赖域半径,重新计算极小值。如此迭代下去,直到满足收敛所需的条件。我们结合下图做进一步的解释。
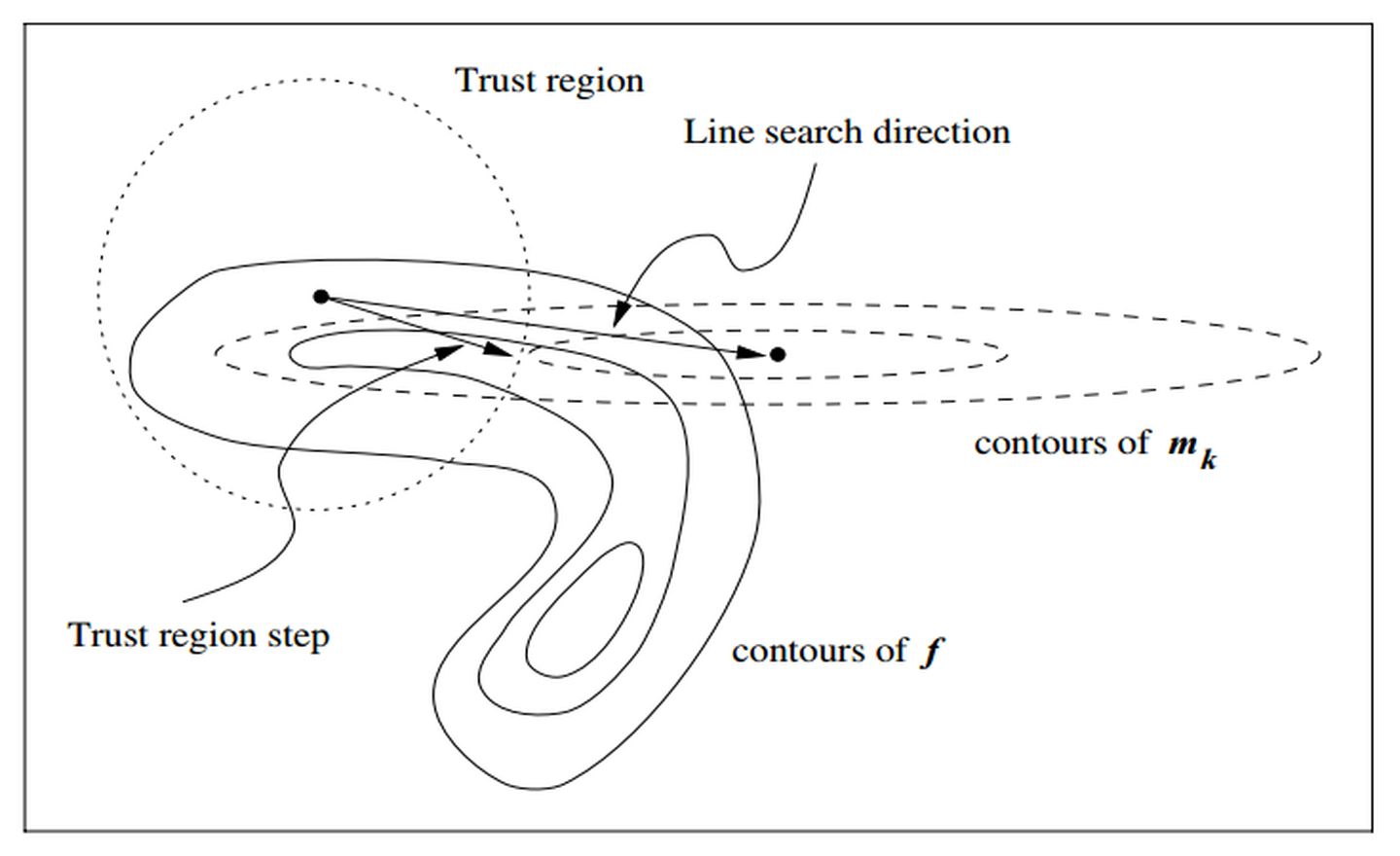
图中,实线表示了目标函数
 的等高线,它非常扭曲,因为这样更容易说明信赖域存在的价值。左上的黑点是当前位置,记作
的等高线,它非常扭曲,因为这样更容易说明信赖域存在的价值。左上的黑点是当前位置,记作
 ,即第
,即第
 次迭代的初始位置。以
次迭代的初始位置。以
为圆心,根据信赖域半径
 作圆,得到左上方圆形的信赖域。在
作圆,得到左上方圆形的信赖域。在
处对目标函数进行二阶近似,得到近似后的二阶函数

其中,
 是
是
处的海森矩阵或近似海森矩阵。在近似后的目标函数中,我们把迭代的步长(含方向)
 作为变量,探究当
作为变量,探究当
在信赖域范围内取何值时能够使得
 最小。
最小。
在二维的情况下,
的等高线是图中椭圆形的虚线。可以看到,在
附近,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 701
701

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









