




 本文介绍了针对目标提取的问题,特别是当目标与背景相似且背景均匀的情况。通过滤波和模糊化预处理,结合动态阈值分割技术,可以有效地分离目标。文中引用了halcon的两个案例,包括surface_scratch.hdev用于处理划痕检测,以及particle.hdev用于在液体中分析低亮度颗粒。这些方法对于剔除亮色物也有一定效果。
本文介绍了针对目标提取的问题,特别是当目标与背景相似且背景均匀的情况。通过滤波和模糊化预处理,结合动态阈值分割技术,可以有效地分离目标。文中引用了halcon的两个案例,包括surface_scratch.hdev用于处理划痕检测,以及particle.hdev用于在液体中分析低亮度颗粒。这些方法对于剔除亮色物也有一定效果。
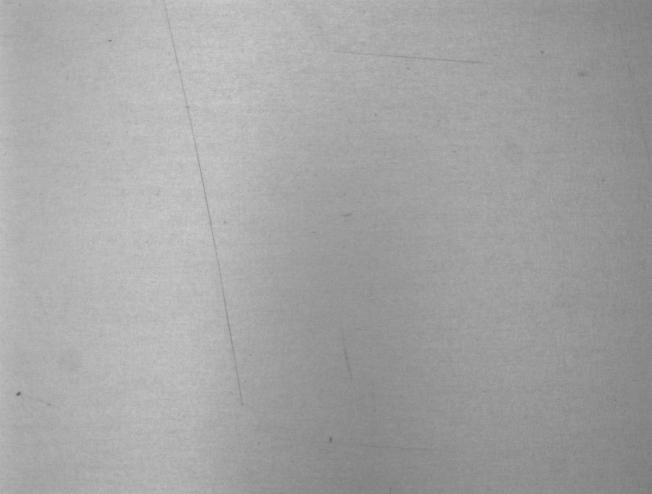
套路:滤波模糊化——动态阈值分割
halcon中案例:surface_scratch.hdev,划痕与背景相似,背景均匀
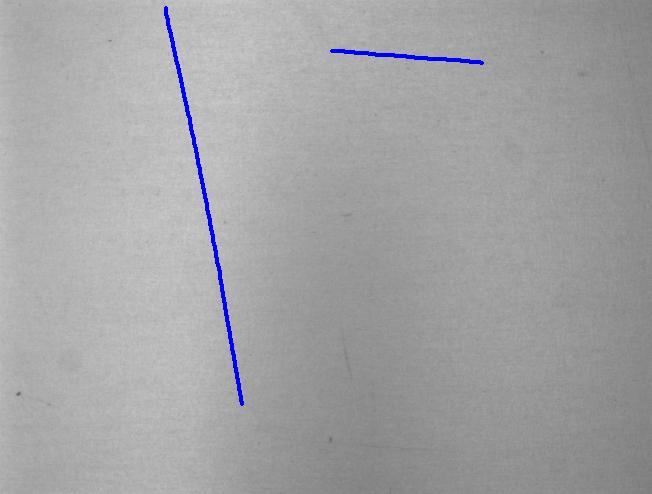
read_image (Image, 'surface_scratch') get_image_size (Image, Width, Height) mean_image (Image, ImageMean, 7, 7) //用7×7的窗口对图像进行均值滤波,获得参考图像
//动态阈值分割 dyn_threshold (Image, ImageMean, DarkPixels, 5, '
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1876
1876

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









