没啥好
#include<stdio.h>
#include<string.h>
#include<math.h>
#include<iostream>
#include<algorithm>
#include<queue>
#include<vector>
#include<set>
#include<stack>
#include<string>
#include<sstream>
#include<map>
#include<cctype>
#include<limits.h>
using namespace std; // 类似于 括号匹配 . 但是还是有 不少区别的 .
int a[1000005];
int main()
{
int t,n,i;
scanf("%d",&t);
while(t--)
{
int maxn =INT_MIN;
scanf("%d",&n);
for(i=1;i<=n;++i) // 从第一个数字 开始 一个个的 向上 加
{
scanf("%d",&a[i]);
if(a[i-1]>0) a[i] += a[i-1]; // 如果上一个数字 是 正数 ( 能让和增大的数字 ) 那就+
if(a[i]>maxn)
maxn=a[i]; // 这里用于储存最大值
}
printf("%d\n",maxn);
}
return 0;
}
说的 直接附上代码把 , 挺简单的 .
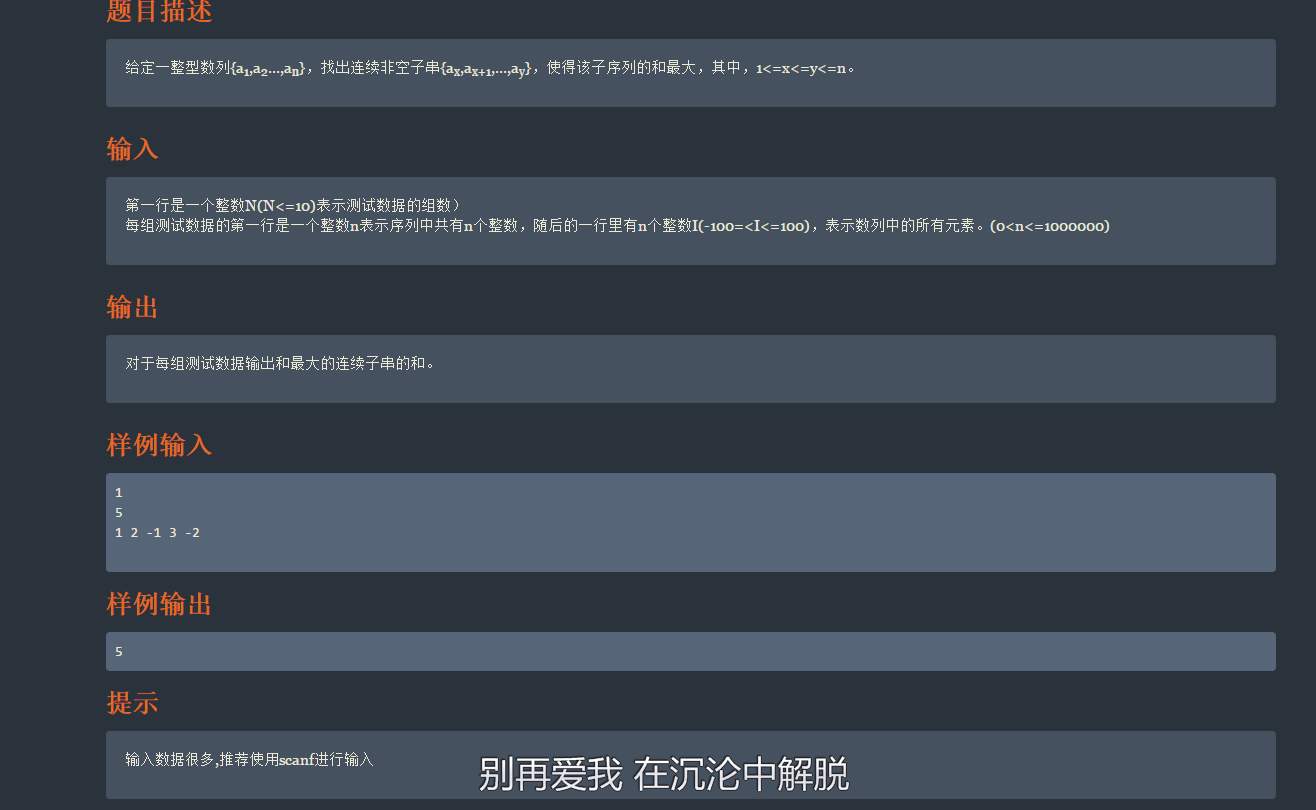
 最大子数组和算法实现
最大子数组和算法实现





















 2809
2809

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









