






 本文介绍了使用C语言实现的几个经典编程任务,包括输出小于平均数的整数、生成斐波那契数列以及计算矩阵各行列之和。通过具体代码示例展示了基本的循环结构、数组操作以及条件判断等知识点。
本文介绍了使用C语言实现的几个经典编程任务,包括输出小于平均数的整数、生成斐波那契数列以及计算矩阵各行列之和。通过具体代码示例展示了基本的循环结构、数组操作以及条件判断等知识点。
要求一
完成
要求二
7-2 输出小于均值的数
#include<stdio.h> int main() { int a[10]; int i,sum,average; for(i=1;i<=10;i++){ scanf("%d",&a[i]); sum=sum+a[i]; } average=sum/10; for(i=1;i<=10;i++){ if(a[i]<average){ printf( "%d ", a[i]); } } printf("\n"); return 0; }
步骤
1.定义数组,i,求和和平均数
2.输入数组的值,计算之间的和,循环到i=10
3.计算平均数
4.找出数字中比平均数小的值,输出
流程图

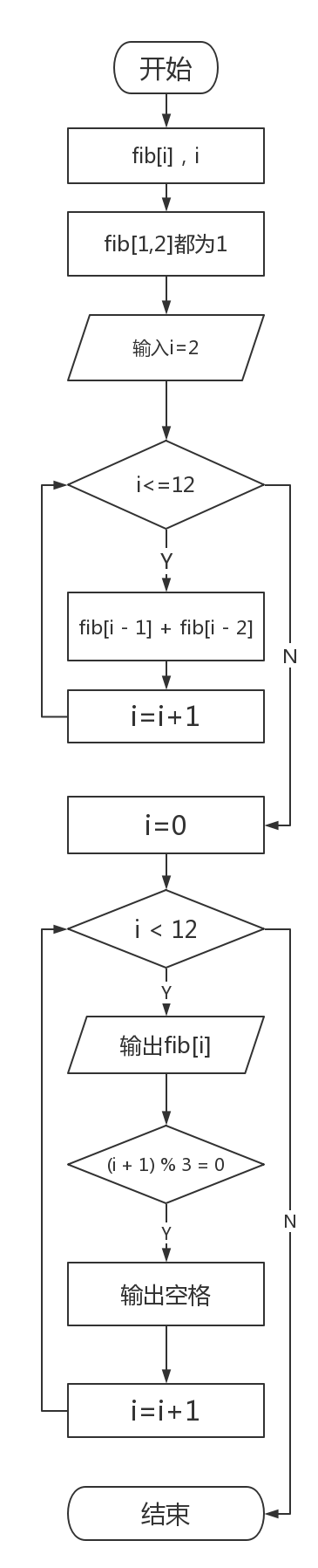
7-4 fibonacci数列
#include <stdio.h> int main(void) { int i; int fib[12] = {1, 1}; for ( i=2; i<12; i++) { fib[i] = fib[i - 1] + fib[i - 2]; } for ( i = 0; i < 12; i++ ){ printf ( "%6d", fib[i] ); if ( (i + 1) % 3 == 0 ){ printf("\n"); } } }
步骤
1.定义i和数组fib
2.第一个和第二个为1
3.第三个数开始为前两个的和,为fib赋值循环
4.输出数组,每三个数换行
流程图
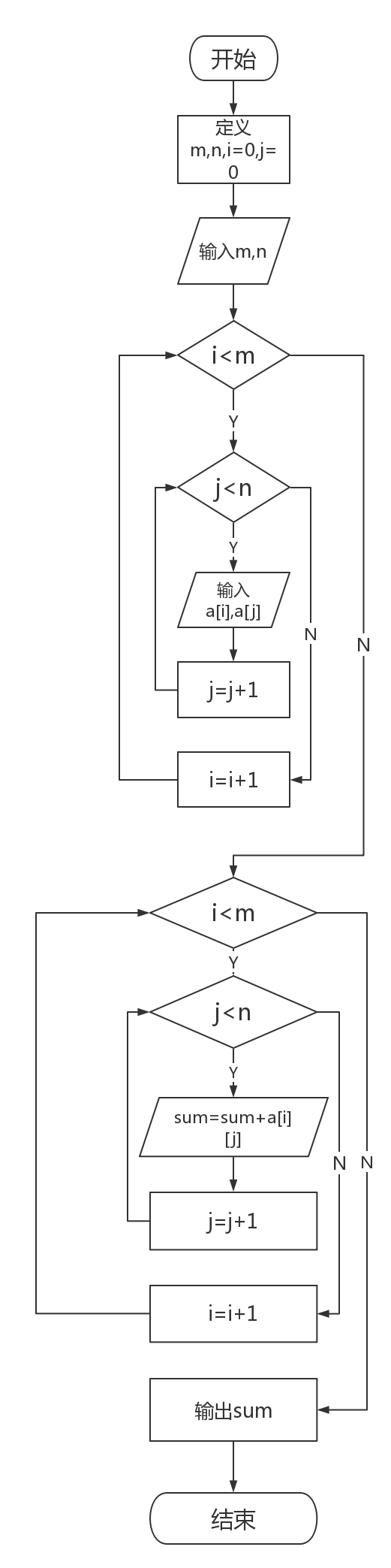
7-2 求矩阵各行元素之和
#include<stdio.h> int main(void) { const int M=6,N=6; int a[M][N]; int m=0,n=0,i=0,j=0,sum=0; scanf("%d %d",&m,&n); for(i=0;i<m;i++) { for(j=0;j<n;j++) { scanf("%d",&a[i][j]); } } for(i=0;i<m;i++) { for(j=0;j<n;j++) { sum=sum+a[i][j]; } printf("%d\n",sum); sum=0; } }
步骤
1.定义两个二维数组,定义m,n,i,j,sum
2.输入m,n,再输入二维数组的值
3.求出各项的和
流程图
git
git地址:https://coding.net/u/wuyaole/p/text5/git/tree/master/
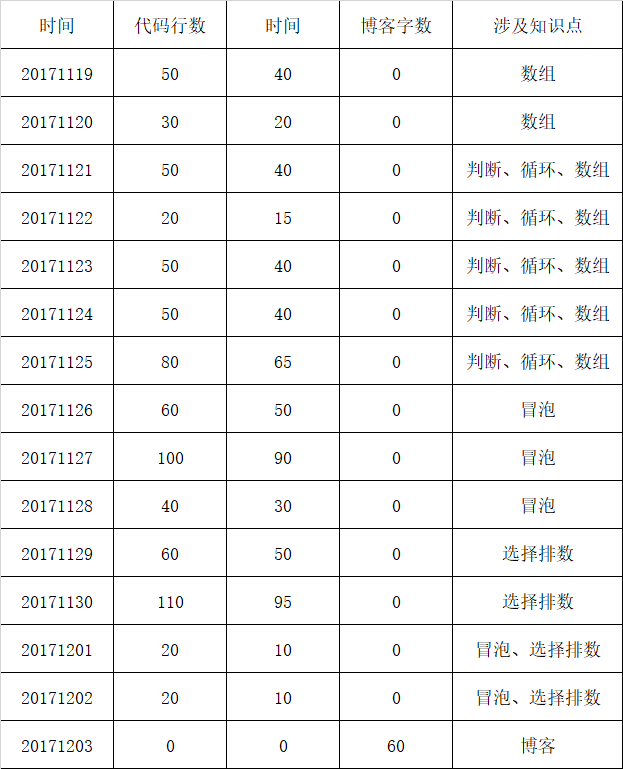
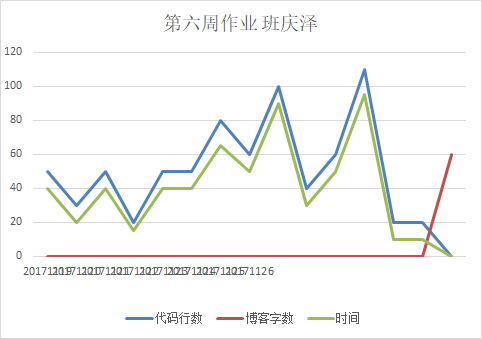
表格
评论
顾家玮:http://www.cnblogs.com/qq807443119/p/7967832.html
张国庆:http://www.cnblogs.com/zgq947/p/7966299.html

丰大为:http://www.cnblogs.com/DavidPark/p/7955168.html

















 2666
2666

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









