






 本文提供了一种求解整数m和n,使得m^2+n^2最大,同时满足特定方程的方法。通过迭代计算和判断,确保m和n为整数,最终找到符合条件的最大m^2+n^2值。
本文提供了一种求解整数m和n,使得m^2+n^2最大,同时满足特定方程的方法。通过迭代计算和判断,确保m和n为整数,最终找到符合条件的最大m^2+n^2值。
对上述方法的更为详细的描述:
解析:
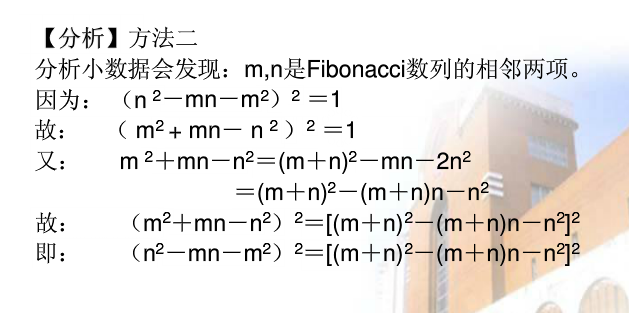
由条件②得出:
n^2-mn-m^2+1=0
n^2-mn-m^2-1=0
根据求根公式:
n1,2=(m+Δ1,2)/2
n3,4=(m-Δ1,2)/2
其中:
Δ1=sqrt(5*m^2+4)
Δ2=sqrt(5*m^2-4)
(sqrt即为求非负实数平方根)
下面再来考虑条件①.由于n>1,因此排除了n3和n4存在的可能性,即
n=n1=(m+Δ1)/2 或者 n=n2=(m+Δ2)/2
又由于n和m是整数,因此Δ1和Δ2应为整数.同样,(m+Δ1)/2 和 (m+Δ2)/2也应为整数.
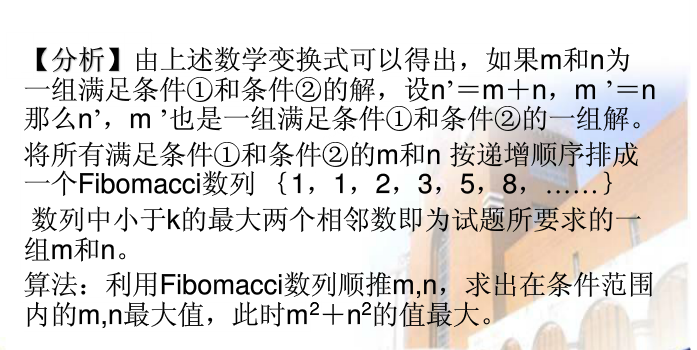
有了上述条件限制和m与n的函数关系式,使得求m^2+n^2值最大的一族m和n就比较方便了.
由于m^2+n^2单调递增,因此我们从m=k出发,按递减方向将m值代入n的求根公式.只要Δ1(或Δ2)为整数,n1(或n2)为整数且小于k,则得出的一组m和n一定使m^2+n^2的值最大.
代码如下:
intm,n,k;
doubledelt1,delt2,n1,n2;
scanf("%d",&k);
for(m=k;m>=1;m--)
{delt1=sqrt(5*m*m+4);
n1=(m+delt1)/2;
n=n1;
if(n==n1&&n<=k)break;
delt2=sqrt(5*m*m-4);
n2=(m+delt2)/2;
n=n2;
if(n==n2&&n<=k)break;
}printf("%d %d\n",m,n);
标准答案是:
1、输入k,n ← 1, m ← 1
2、t ← n+m
3、若 t ≤ k,则 m ← n, n ← t,转下一步
4、若t ≤ k,则返回第2步,否则转下一步
5、输出m、n,结束
代码如下:
int n=1,m=1,k,t; cin>>k; do { t=n+m; if(t<=k) { m=n; n=t; } } while(t<=k); cout<<"m="<<m<<endl<<"n="<<n;

















 1083
1083

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









