



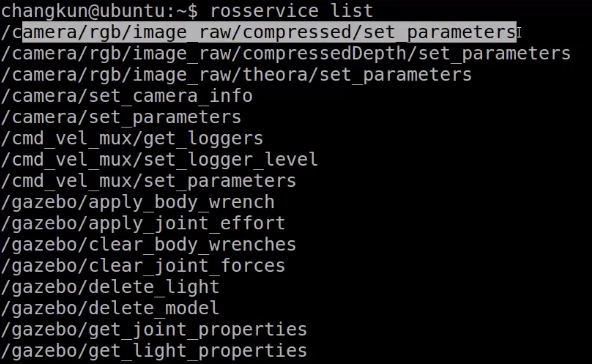
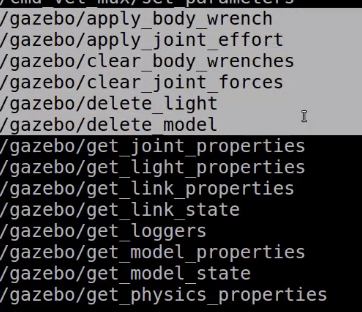


发送一个灯光的名字,返回是否删除成功,以及状态信息
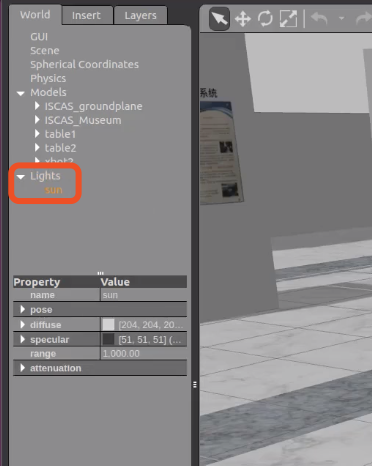 sun
sun

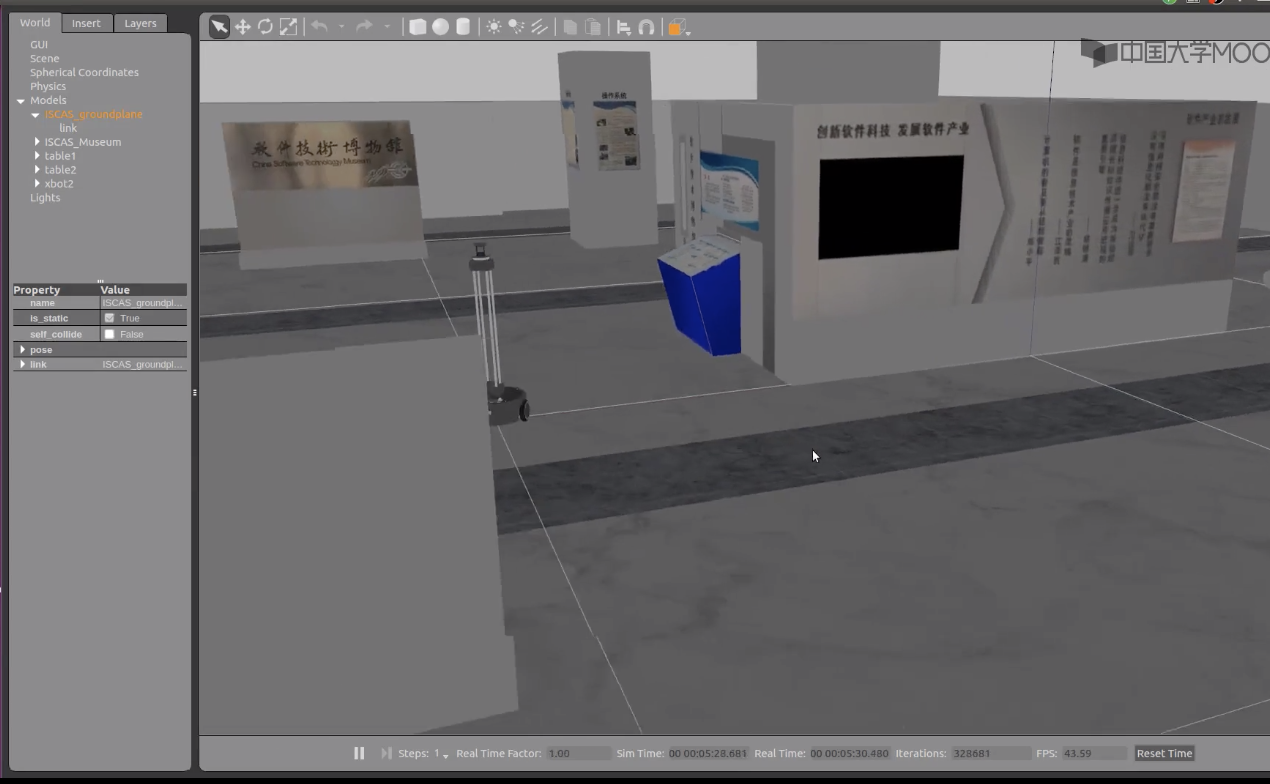
环境变暗了

rosparam set /gazebo/gravity_z ...
把当前的所有rosparam参数下载到一个yaml文件里


 博客内容涉及灯光操作,发送灯光名字可返回删除结果及状态信息,如发送'sun'后环境变暗。还提到将当前所有rosparam参数下载到yaml文件里,并给出了相关操作代码及转载链接。
博客内容涉及灯光操作,发送灯光名字可返回删除结果及状态信息,如发送'sun'后环境变暗。还提到将当前所有rosparam参数下载到yaml文件里,并给出了相关操作代码及转载链接。
发送一个灯光的名字,返回是否删除成功,以及状态信息
sun
环境变暗了
rosparam set /gazebo/gravity_z ...
把当前的所有rosparam参数下载到一个yaml文件里
转载于:https://www.cnblogs.com/ecoflex/p/10804613.html

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























