




 本文介绍了一种基于Faster R-CNN结构的改进方法,用于多方向目标检测。除了标准的水平框坐标,还引入了旋转框坐标及旋转因子,提高了对于非水平目标的检测精度。
本文介绍了一种基于Faster R-CNN结构的改进方法,用于多方向目标检测。除了标准的水平框坐标,还引入了旋转框坐标及旋转因子,提高了对于非水平目标的检测精度。
- https://blog.youkuaiyun.com/liuxiaoheng1992/article/details/103579470
- https://arxiv.org/abs/1911.09358
Gliding vertex on the horizontal bounding box for multi-oriented object detection

一、网络结构
文章采用的就是Fasterrcnn的结构,只是预测的结果稍微不太一样,多了几个。如下图所示。
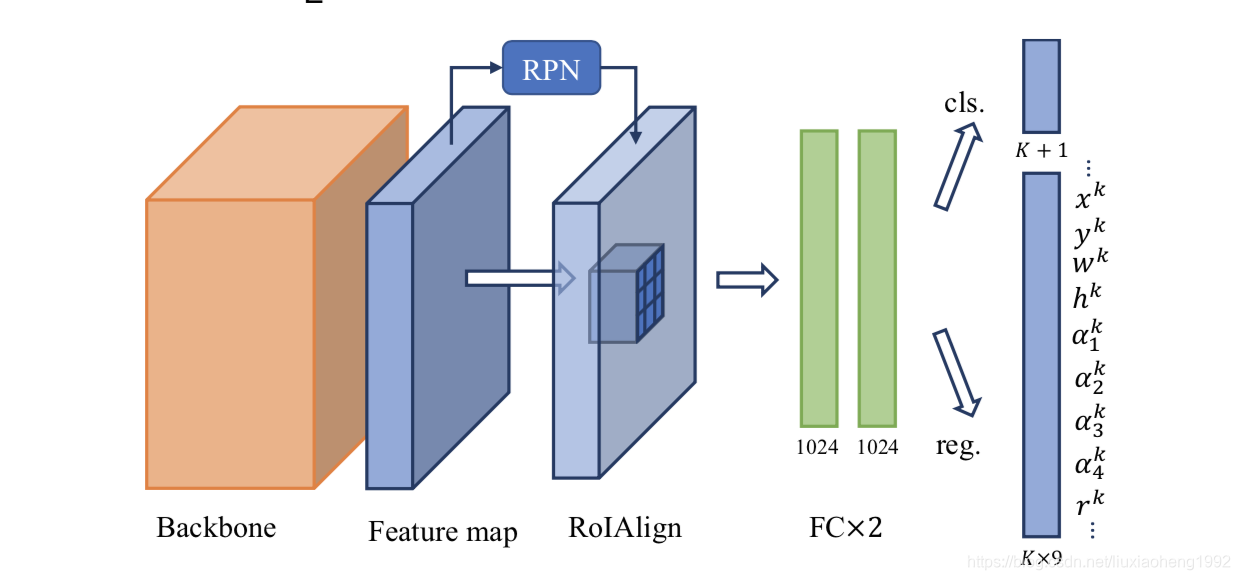
网络的输出除了有fasterrcnn有的分类结果,水平框坐标(x,y,w,h)以外,还有求旋转矩形需要的额外信息(α1,α2,α3,α4)(\alpha_1, \alpha_2, \alpha_3, \alpha_4)(α1,α2,α3,α4),还有用来表示该矩形是否为水平还是旋转的旋转因子r。
二、标签的生成
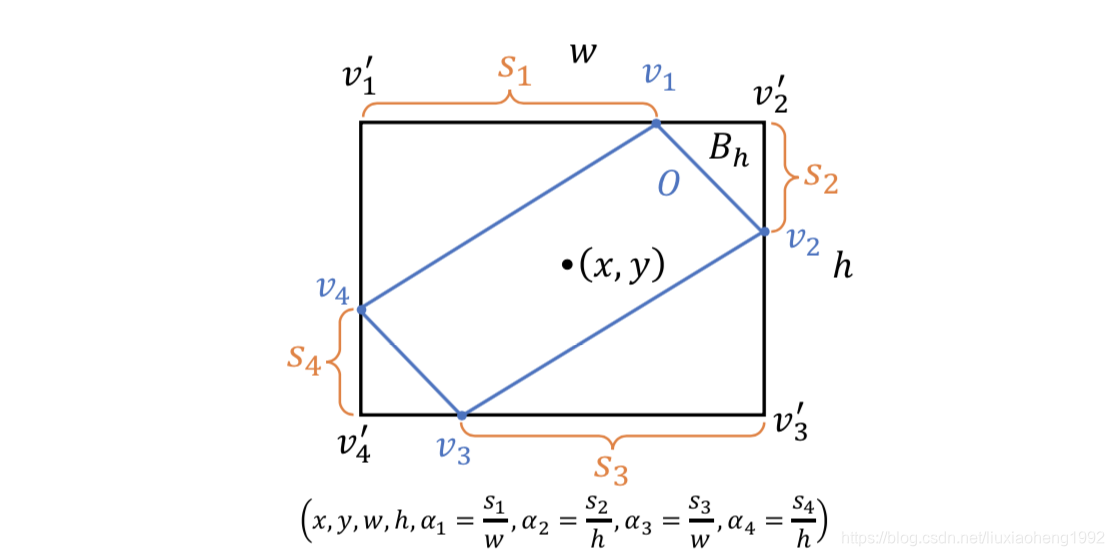
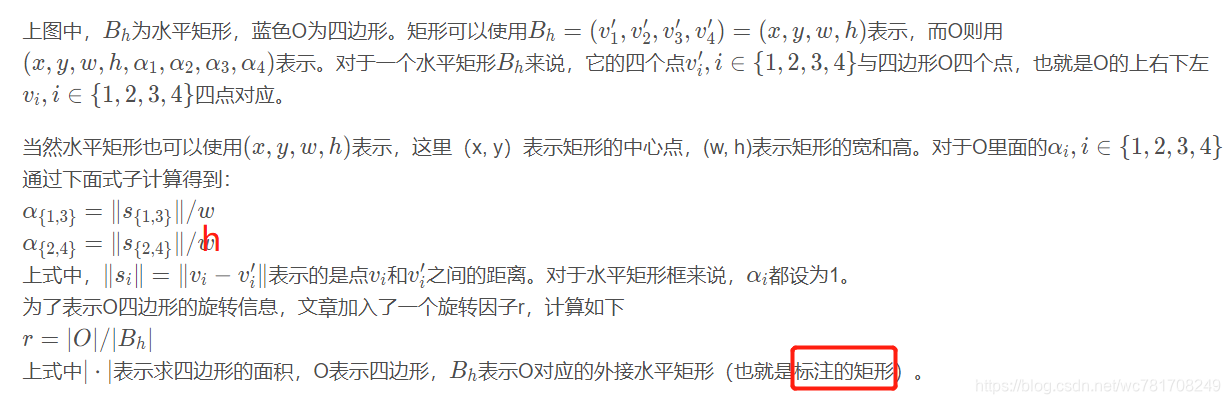
要知道标签是怎么生成的,首先需要知道有哪些标签,上面已经提到了,除了和fasterrcnn一样的有类型标签,有水平矩形的坐标标签(x~,y~,w~,h~)(\tilde{x}, \tilde{y}, \tilde{w}, \tilde{h})(x~,y~,w~,h~)
,还需要有表示旋转框的额外标签(α~1,α~2,α~3,α~4)(\tilde{\alpha}_1, \tilde{\alpha}_2, \tilde{\alpha}_3, \tilde{\alpha}_4)(α~1,α~2,α~3,α~4), 表示框是否旋转的旋转因子r~\tilde{r}r~
。可以通过看下图清楚的了解这些概念
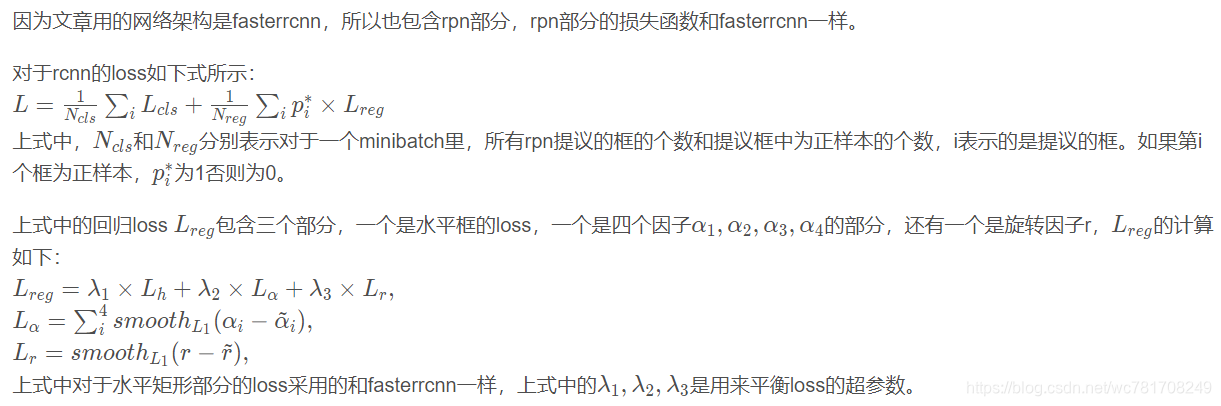
三、损失函数


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









