




 本文介绍如何为X4412开发板配置Linux内核驱动,包括设备树文件详解、内核编译及根文件系统的构建过程,并分享了常见问题及其解决思路。
本文介绍如何为X4412开发板配置Linux内核驱动,包括设备树文件详解、内核编译及根文件系统的构建过程,并分享了常见问题及其解决思路。
代码: git clone https://github.com/chasinglulu/linux.git -b X4412-Kernel
设备树文件
linux-4.16.0/arch/arm/boot/dts/exynos4412-x4412.dts
/*
* X4412 board device tree source
*
* Device tree source file for 9tripod's X4412 board which is based on
* Samsung's Exynos4412 SoC.
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License version 2 as
* published by the Free Software Foundation.
*/
/dts-v1/;
#include <dt-bindings/gpio/gpio.h>
#include <dt-bindings/input/input.h>
#include <dt-bindings/interrupt-controller/irq.h>
#include <dt-bindings/pwm/pwm.h>
#include "exynos4412.dtsi"
#include "exynos4412-ppmu-common.dtsi"
#include "exynos-mfc-reserved-memory.dtsi"
/ {
model = "X4412 board based on Exynos4412";
compatible = "9tripod,X4412", "samsung,exynos4412", "samsung,exynos4";
memory@40000000 {
device_type = "memory";
reg = <0x40000000 0x40000000>;
};
chosen {
bootargs = "console=ttySAC3,115200";
stdout-path = &serial_3;
};
firmware@0203F000 {
compatible = "samsung,secure-firmware";
reg = <0x0203F000 0x1000>;
};
fixed-rate-clocks {
xxti {
compatible = "samsung,clock-xxti";
clock-frequency = <0>;
};
xusbxti {
compatible = "samsung,clock-xusbxti";
clock-frequency = <24000000>;
};
};
leds {
compatible = "gpio-leds";
led1 {
label = "led1:heart";
gpios = <&gpx1 6 GPIO_ACTIVE_LOW>;
default-state = "on";
linux,default-trigger = "heartbeat";
};
led2 {
label = "led2";
gpios = <&gpx1 7 GPIO_ACTIVE_LOW>;
default-state = "off";
};
led3 {
label = "led3";
gpios = <&gpx2 6 GPIO_ACTIVE_LOW>;
default-state = "off";
};
led4 {
label = "led4";
gpios = <&gpx2 7 GPIO_ACTIVE_LOW>;
default-state = "off";
linux,default-trigger = "timer";
};
};
gpio-keys {
compatible = "gpio-keys";
left {
label = "Key Left";
linux,code = <KEY_LEFT>;
gpios = <&gpx1 0 GPIO_ACTIVE_LOW>;
};
right {
label = "Key Right";
linux,code = <KEY_RIGHT>;
gpios = <&gpx1 1 GPIO_ACTIVE_LOW>;
};
vol-up {
label = "Key Vol+";
linux,code = <KEY_UP>;
gpios = <&gpx1 2 GPIO_ACTIVE_LOW>;
};
vol-down {
label = "Key Vol-";
linux,code = <KEY_DOWN>;
gpios = <&gpx1 3 GPIO_ACTIVE_LOW>;
};
};
camera: camera {
pinctrl-names = "default";
pinctrl-0 = <&cam_port_a_clk_active>;
status = "okay";
assigned-clocks = <&clock CLK_MOUT_CAM0>;
assigned-clock-parents = <&clock CLK_XUSBXTI>;
};
};
&fimc_0 {
status = "okay";
assigned-clocks = <&clock CLK_MOUT_FIMC0>,
<&clock CLK_SCLK_FIMC0>;
assigned-clock-parents = <&clock CLK_MOUT_MPLL_USER_T>;
assigned-clock-rates = <0>, <176000000>;
};
&fimc_1 {
status = "okay";
assigned-clocks = <&clock CLK_MOUT_FIMC1>,
<&clock CLK_SCLK_FIMC1>;
assigned-clock-parents = <&clock CLK_MOUT_MPLL_USER_T>;
assigned-clock-rates = <0>, <176000000>;
};
&ehci {
status = "okay";
port@0 {
status = "okay";
};
port@1 {
status = "okay";
};
port@2 {
status = "okay";
};
};
&pwm {
status = "okay";
pinctrl-0 = <&pwm1_out>;
pinctrl-names = "default";
samsung,pwm-outputs = <1>;
};
&i2c_2 {
status = "okay";
};
&i2c_8 {
status = "okay";
};
&exynos_usbphy {
status = "okay";
};
&hsotg {
dr_mode = "peripheral";
status="okay";
};
&mshc_0 {
pinctrl-0 = <&sd4_clk &sd4_cmd &sd4_bus4 &sd4_bus8>;
pinctrl-names = "default";
status = "okay";
cd-gpio= <&gpk0 2 GPIO_ACTIVE_HIGH>;
clock-frequency = <400000000>;
samsung,dw-mshc-ciu-div = <0>;
samsung,dw-mshc-sdr-timing = <2 3>;
samsung,dw-mshc-ddr-timing = <1 2>;
bus-width = <8>;
cap-mmc-highspeed;
};
&sdhci_2 {
bus-width = <4>;
pinctrl-0 = <&sd2_clk &sd2_cmd &sd2_cd &sd2_bus4>;
pinctrl-names = "default";
cd-gpios = <&gpk2 2 GPIO_ACTIVE_HIGH>;
cd-inverted;
card-detect-delay = <200>;
cap-sd-highspeed;
status = "okay";
};
&serial_0 {
status = "okay";
};
&serial_1 {
status = "okay";
};
&serial_2 {
status = "okay";
};
&serial_3 {
status = "okay";
};
&pinctrl_0 {
hsic_reset: hsic-reset {
samsung,pins = "gpc0-0";
samsung,pin-function = <EXYNOS_PIN_FUNC_INPUT>;
Samsung,pin-pud = <EXYNOS_PIN_PULL_NONE>;
samsung,pin-drv = <EXYNOS4_PIN_DRV_LV4>;
};
};配置与编译
make ARCH=arm exynos_defconfig
make ARCH=arm ACROSS_COMPILE=arm-linux-gnueabihf- -j8
cat linux-4.16.0/arch/arm/boot/zImage linux-4.16.0/arch/arm/boot/dts/exynos4412-x4412.dtb > zImage_dtb根文件系统
使用ubuntu-base构建根文件系统,这样能快速构建一个比较完善的文件系统。
1 Install Tools
sudo apt-get install qemu-user-static binfmt-support2 get ubuntu-base
wget http://cdimage.ubuntu.com/ubuntu-base/releases/18.04/release/ubuntu-base-18.04-base-armhf.tar.gz3 create rootfs
mkdir ubuntu-18.04
sudo tar -xzf ubuntu-base-18.04-base-armhf.tar.gz -C ubuntu-18.04当执行chroot时,会调用arm架构的/bin/bash程序,这时需要借助qemu-arm-static模拟执行这个程序
sudo cp /usr/bin/qemu-arm-static ubuntu-18.04/usr/bin/将宿主机的DNS配置复制到目标机的根文件系统中,用于后面工具的下载
sudo cp /etc/resolv.conf rootfs/etc/resolv.conf安装内核modules
cd linux-4.16.0
sudo make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- mudules_install INSTALL_MOD_PATH=/path/to/ubuntu-18.04/挂载必要文件系统
sudo mount -t proc /proc ubuntu-18.04/proc
sudo mount -t sysfs /sys ubuntu-18.04/sys
sudo mount -o bind /dev ubuntu-18.04/dev
sudo mount -o bind /dev/pts ubuntu-18.04/dev/pts
sudo chroot ubuntu-18.04安装基本软件
apt-get sudo vim bash-completion net-tools ethtool wireless-tools ifupdown network-manager iputils-ping resolvconf udev make gcc添加用户
adduser ubuntu
addgroup ubuntu adm
addgroup ubuntu sudo
addgroup ubuntu audio
addgroup ubuntu video
addgroup ubuntu dialout设置主机名称
echo "X4412" >/etc/hostname
echo "127.0.0.1 localhost" >/etc/hosts
echo "127.0.0.1 X4412" >>/etc/hosts4 package rootfs
exit
sudo umount ubuntu-18.04/proc
sudo umount ubuntu-18.04/sys
sudo umount ubuntu-18.04/dev/pts
sudo umount ubuntu-18.04/dev
cd ubuntu-18.04
sudo tar -cjf ../ubuntu-rootfs.18.04.tar.bz2 .烧写
制作SD启动卡更新X4412开发板上的映像,参考开发板使用手册
结果
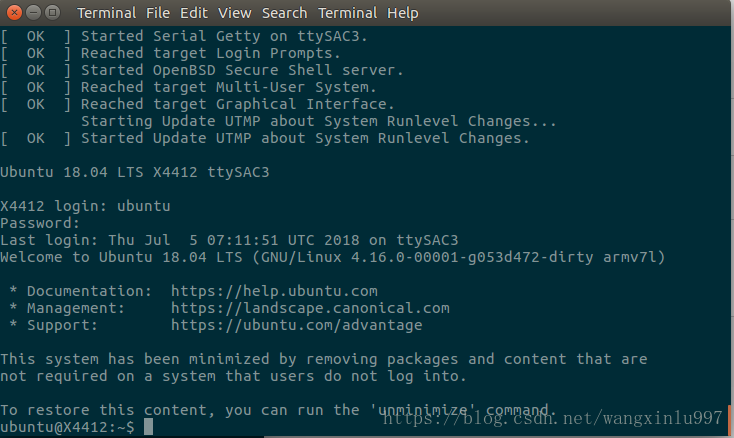
现在DM9000C以太网卡驱动不能正确适配,重启后usb不能识别外接设备,camera驱动也不能适配

















 2364
2364

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









