






 本文分享了在使用FlashDB时遇到的三个关键点:1)合理分配空间以减少初始化时间;2)初始化时序数据库时宏命名需保持一致;3)调整最大长度以避免断言错误。
本文分享了在使用FlashDB时遇到的三个关键点:1)合理分配空间以减少初始化时间;2)初始化时序数据库时宏命名需保持一致;3)调整最大长度以避免断言错误。
简介:在使用flashdb管理数据时出现一些比较有意思的点分享一下。
1 初始化时间和分配空间相关。
在对时序数据库和键值数据库进行配置的时候,博主用的时一块8M的外部flash来管理相关的数据。划分成了很多段来管理。在分配时如果每个空间给到的内存空间太大,比如任意一个给个1M的空间,初始化时间会很长。影响启动的效率。
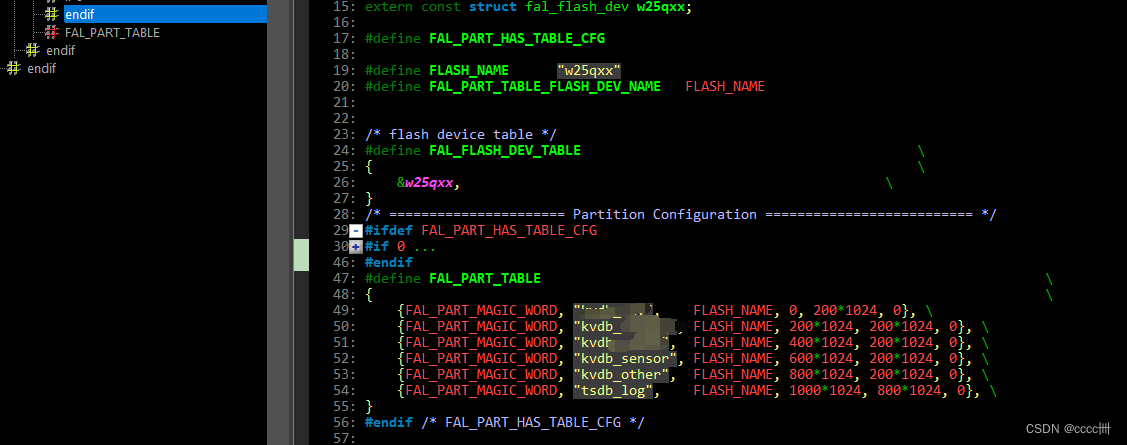
2 初始化命名要跟宏那边一致
同上,在初始化时序数据库和键值数据库的时候宏要保持一致。不然会导致
Error: Partition (%s) not found.

3 使用时序数据库的时候最大长度一般都是写成固定的长度
如果这个长度不够长会导致进入断言has assert failed at tsl_append.blob->size <= db->max_len.
MAX_LOG_LEN 可自定义写长一点。


















 8098
8098

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









