




 文章详细描述了一种无人机飞控系统的半物理仿真平台,该平台旨在解决现有测试方法的不足,通过硬件和软件设计实现飞控系统的动态性能模拟、故障设置和飞行控制策略修正。文章涵盖了平台的功能、设计方案、硬件选型和应用软件开发,以及功能测试验证的结果。
文章详细描述了一种无人机飞控系统的半物理仿真平台,该平台旨在解决现有测试方法的不足,通过硬件和软件设计实现飞控系统的动态性能模拟、故障设置和飞行控制策略修正。文章涵盖了平台的功能、设计方案、硬件选型和应用软件开发,以及功能测试验证的结果。
0 引言
无人机作为模拟飞机类来袭目标,可为防空武器系统的火控雷达校飞、射击等任务提供空中靶标,是武器系统研制、鉴定过程中必不可少的装备。作为无人机的核心组成部分之一,飞控系统通过控制无人机的姿态,从而完成无人机各种模态下的飞行任务。某无人机飞控系统现有的测试方法包括分立部件测试和部件装机后的整机综合测试。两种方法均属于常规的静态测试,组织实施复杂、测试效率较低、任务准备周期长,而且对于无人机实际飞行过程的动态性能无法验证,对测试中出现的故障难以定位,对于飞行中的环境干扰因素(主要是风干扰)和传感器失效后无人机的飞行情况也无法模拟,从而无法有针对性的进行飞行控制策略修正。综上问题,研制一套无人机飞控系统半物理仿真平台的任务显得尤为迫切。
1 平台总体功能及设计方案
1.1 平台总体功能
该平台以现有某型无人机飞控系统为测试对象,主要完成以下功能:
(1)与无人机飞控计算机和电动舵机、油门电机等实物结合,完成飞控系统的仿真测试;
(2)具备风干扰、力矩干扰条件下的飞行性能模拟,并以二维曲线方式实时显示无人机的飞行航迹、舵偏角、舵偏角速率等变化情况;
(3)能够进行无人机飞控系统部分传感器的故障设置,进行故障情况下的飞行模态仿真。
1.2 平台总体设计方案
半物理仿真平台由硬件设备和应用软件两部分组成。硬件设备包括新建的飞行系统模拟分系统、传感器与机载测控模拟分系统、遥控/遥测模拟分系统、指挥显示分系统、无人机外形显示分系统,以及现有的飞控计算机、飞控计算机接口箱、电动舵机、油门电机等实物。应用软件包括新建各分系统的应用程序。半物理仿真平台的原理组成框图如图1所示。
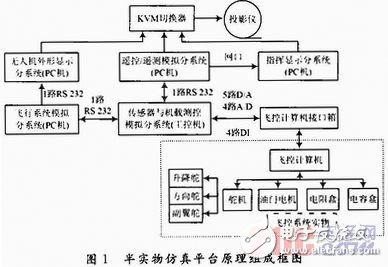
半物理仿真平台的工作原理概况如下:传感器与机载测控模拟分系统通过接口箱与飞控计算机交换无人机的舵偏角、角速率、油门开度、遥控指令、外部干扰等
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2635
2635

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









