







 这篇博客介绍了ROS的安装教程链接,并强调了正确配置ROS环境变量的重要性。ROSbuild和catkin的特性进行了对比,推荐使用catkin,因为其更灵活。文中详细讲解了如何创建和编译catkin工作空间,以及如何通过source setup.*sh文件设置ROS工作环境。最后,提到了查看ROS_PACKAGE_PATH的方法。
这篇博客介绍了ROS的安装教程链接,并强调了正确配置ROS环境变量的重要性。ROSbuild和catkin的特性进行了对比,推荐使用catkin,因为其更灵活。文中详细讲解了如何创建和编译catkin工作空间,以及如何通过source setup.*sh文件设置ROS工作环境。最后,提到了查看ROS_PACKAGE_PATH的方法。
ROS的安装可以按照教程来。不再多说
http://wiki.ros.org/kinetic/Installation/Ubuntu
如果你在查找和使用ROS软件包方面遇到了问题,请确保你已经正确配置了脚本环境。一个检查的好方法是确保你已经设置了像ROS_ROOT和ROS_PACKAGE_PATH这样的环境变量,可以通过以下命令查看:
$ export | grep ROS

rosbuild比较简单也易于使用,而catkin使用了更加标准的CMake规则,所以比较复杂,但是也更加灵活,特别是对于那些想整合外部现有代码或者想发布自己代码的人
创建工作空间,这里使用catkin
mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src
这时候内部内有任何软件包
只有一个CMakeLists.txt链接文件),你依然可以编译它:
$ cd ~/catkin_ws/ $ catkin_make
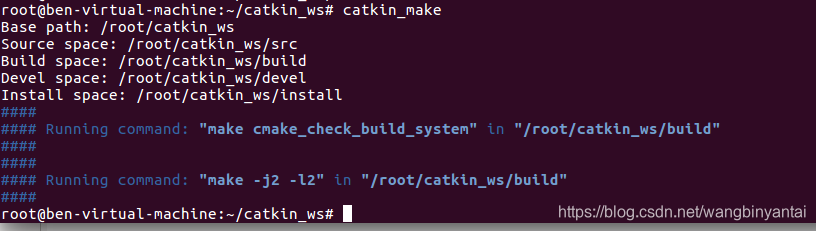
catkin_make命令在catkin 工作空间中是一个非常方便的工具。如果你查看一下当前目录应该能看到'build'和'devel'这两个文件夹。在'devel'文件夹里面你可以看到几个setup.*sh文件。source这些文件中的任何一个都可以将当前工作空间设置在ROS工作环境的最顶层
source devel/setup.bash
如果查看路径,使用下面命令
echo $ROS_PACKAGE_PATH
到目前为止,工作空间已经建立好


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









