







论文地址:(https://arxiv.org/abs/1904.09569?context=cs)
简单介绍
本文论文主要介绍是检测出显著的目标;也即是目标物体的轮廓;较为准确得到目标准确的轮廓的方法是基于两个池化的操作;具体结构如下所示:
网络结构
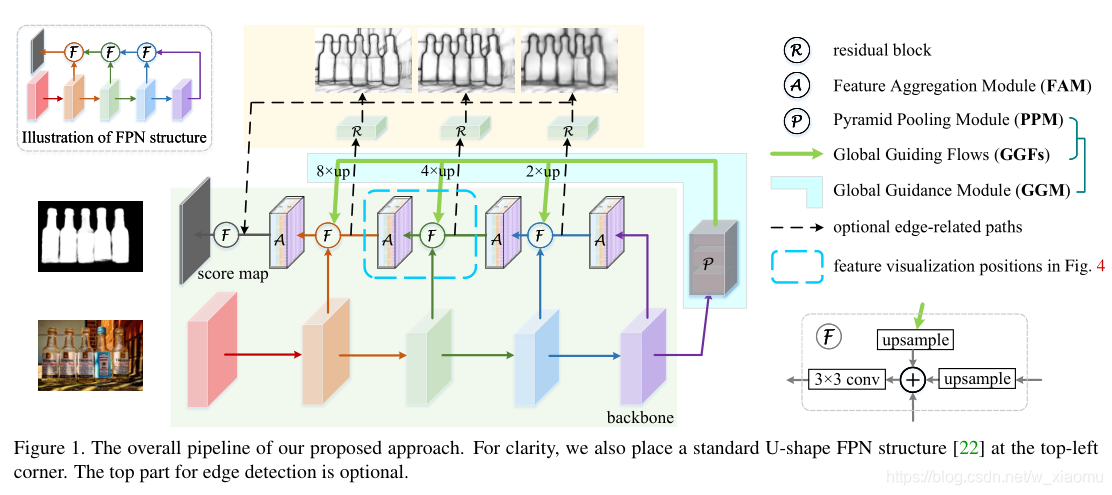
本文引入了两个关于池化的结构,一个是PPM,另一个结构是FAM结构;PPM的结构 是总共是四个分支;第一个和最后一个分支分为为恒等映射和全局平均池化,中间两个分支是采用可调整的平均池化,使得输出的空间大小为33的分辨率和55的分辨率。
对于FAM的结构,具体如下图:
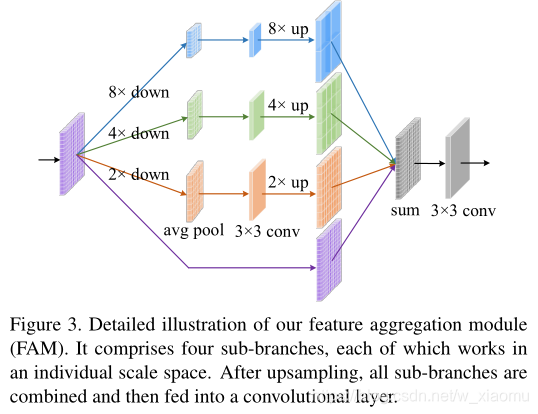
在本结构图中,将最后的一个分支采取平均池化,不变,然后将该结构进行2,4,8倍的下采样得到不同的结构图,然后将得到不同分辨率的结构图,然后执行2,4,8倍的上采样,然后将这三部分所得到的结构图与最初的结构图,逐元素相加,然后接3*3卷积。
该图的目的就是为了降低不同层的特征与GGM的区别。
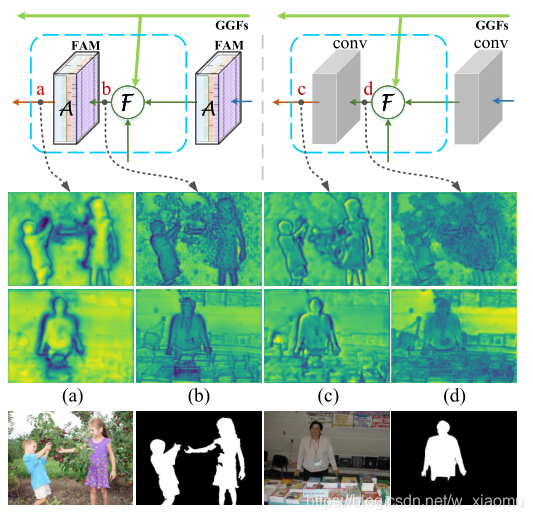
下图说明FAM的结构与普通卷积的结构:
实验
实验1 验证PPM,GGF,FAM的结构
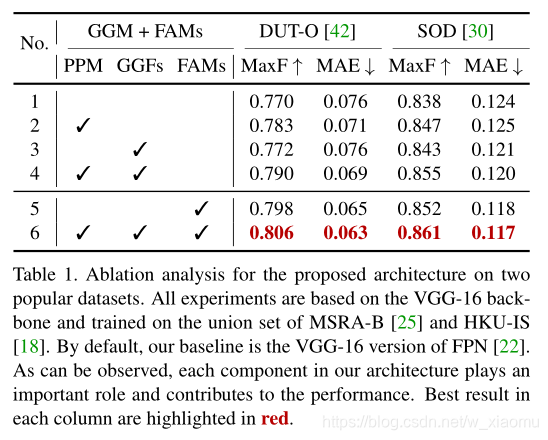
从图中可以看出,随着条件的变化,实验结构越来越好。
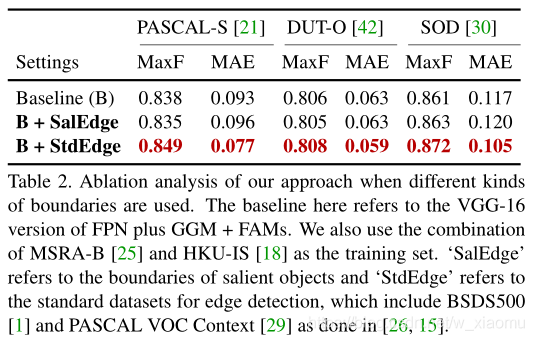
实验2 不同的设定下,在不同数据集下的对比实验
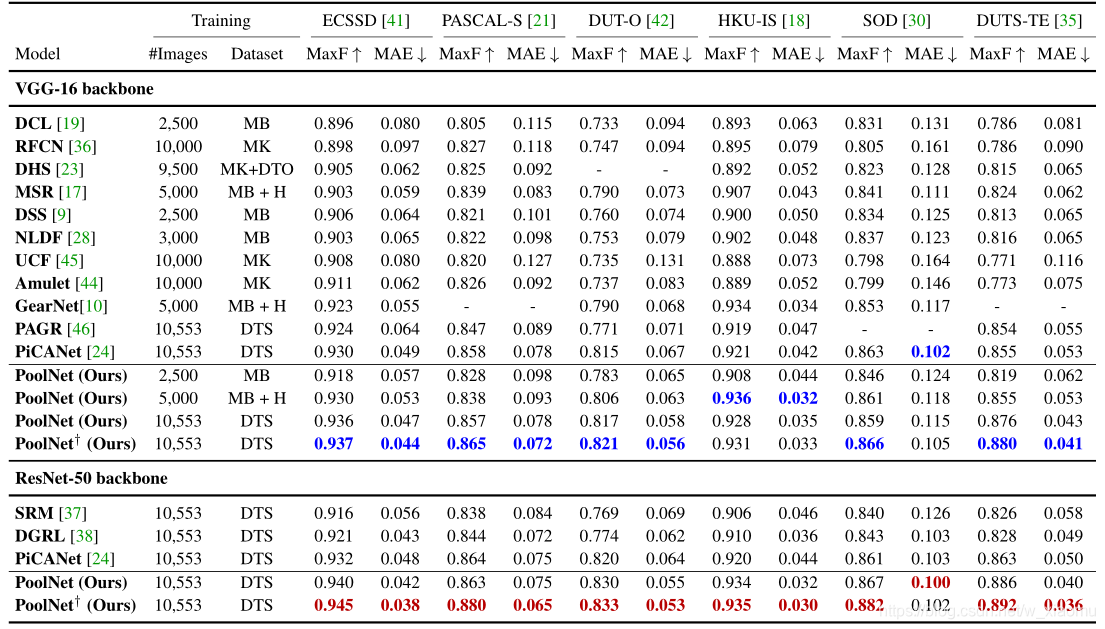
实验3 不同模型的结构对比
总结:
本文可以借鉴的方法有如下:
1 FAM的结构;不同倍数的池化,会得到不同的分辨率,使得预测更加准确;
2.PPM结构;使用池化的操作。

















 341
341

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









