



电动汽车电池监测无线传感器节点的低功耗设计
摘要
Electric车辆需要对汽车电池进行监测。无线传感可消除连接导线,从而降低安装和维护成本。本文提出了一种用于监测电动汽车电池组的低功耗无线传感器节点及接口电路。为了节省功耗,所提出的传感器节点采用唤醒/睡眠模式,并通过数据压缩减少传输时间。该无线传感器节点采用德州仪器的低功耗微控制器CC1310进行原型实现,其中CC1310集成了Zigbee射频模块和一个12位模数转换器。该原型可监测九个电池单元的电压和温度以及电池组电流。实测原型平均功耗为1.2毫瓦。考虑到微控制器在传输期间的功耗为22毫瓦,所提方法显著降低了功耗。
关键词
来自汽车的能量采集(EH)。振动能量采集,热能采集,无线传感器节点,电动汽车。
一、引言
随着电动汽车的普及,对电动汽车汽车电池的监测成为电动汽车领域的一个重要问题。一个电池组由多达数千个单体电池[1]组成,必须对每个电池单体[2]的电压、电流和温度进行监测。目前,现有的电动汽车通常使用导线将各个电池单体的状态传递至前控制台,而这类导线的安装和维护成本较高。
无线传感是解决该问题的一种有前景的方法。无线传感器节点(WSN)的电力可来自汽车电池,或通过振动和温差等环境源获取[3],[4],[5],[6]。无论哪种情况,降低用于监测汽车电池的无线传感器节点的功耗都是必要的,这也是所提出的无线传感器节点设计的重点。用于汽车电池监测的无线传感器节点需要通信距离较短(小于2米),且数据速率较低(低于几百千比特每秒)。
基于能量收集供电的无线传感器网络已被开发用于不同的应用。Zimmermann等人[7]开发了一种基于Atmel megaAVR微控制器的低功耗无线传感器网络,该网络通过采集汽车振动能量进行供电。该微控制器每隔80秒唤醒一次,用三秒钟传输三个测量数据,其目标应用是监测轮胎压力。Ruan等人在[8]中提出了一种基于恩智浦半导体Jennic JN5148微控制器的无线传感器网络。一种能量感知接口会在储能电容中有足够能量时唤醒微控制器,否则将其关闭。megaAVR和JN5148微控制器均采用Zigbee协议,适用于低数据速率和短距离通信,例如无线传感器网络。宋和谭分析了ZigBee无线传感器网络在唤醒和传输等各个阶段的功耗情况[9]。
本文介绍了一种用于汽车电池监测的无线传感器网络(WSN),该网络采用德州仪器(TI)的低功耗微控制器CC1310[10]进行原型设计。该设备集成了一个低功耗射频收发器,支持低于1GHz的多种射频标准,数据速率最高可达500 Kbps。此外,该设备还集成了一个12位模数转换器和一个低功耗传感器控制器。
本文的结构如下。第二节介绍了汽车电池、CC1310的TI评估板以及所提出的系统所使用的传感器的相关预备知识。第三节描述了所提出的无线传感器网络及降低功耗的方案。第四节展示了实验结果,第五节对全文进行总结。
II. 预备知识
A. 电动汽车电池
汽车电池的基本单元是标称电压为3.7伏特的锂离子电池单体。多个电池单体通过串联和并联连接形成一个模块。多个此类模块再通过串联连接构成标称电压为370伏特的电池组。电池组连接至控制器以驱动电机。不同类型的车型所使用的电池组有所不同。

电动汽车。例如,图1中2018款雪佛兰Bolt的电池组由96个串联的pouch电池(袋形电池)构成,每个pouch电池包含3个LG NMC622电池单体[1]。特斯拉Model 3的电池组由96个电池模块组成,其中每个模块由46个并联的松下NCA电池单体构成[1]。
汽车电池组需要监测每个电池单体的电压、电流和温度。特别是,由于不同驾驶条件以及变化的负载条件等多种因素,电池电流可能会快速波动。例如,张等人提供了在平路和上坡道路试驾期间电流波动的曲线图。这些曲线图表明,电流尖峰的发生间隔小于一秒[11]。Uddin等人展示了从再生制动操作测试中获得的电流频谱密度[12]。结果表明,大部分电流频率低于510赫兹。Soares等人从类似城市驾驶的试驾中采集了电流频谱密度,并显示显著的谐波频率位于150赫兹以下[13]。
B. TI CC1310评估板
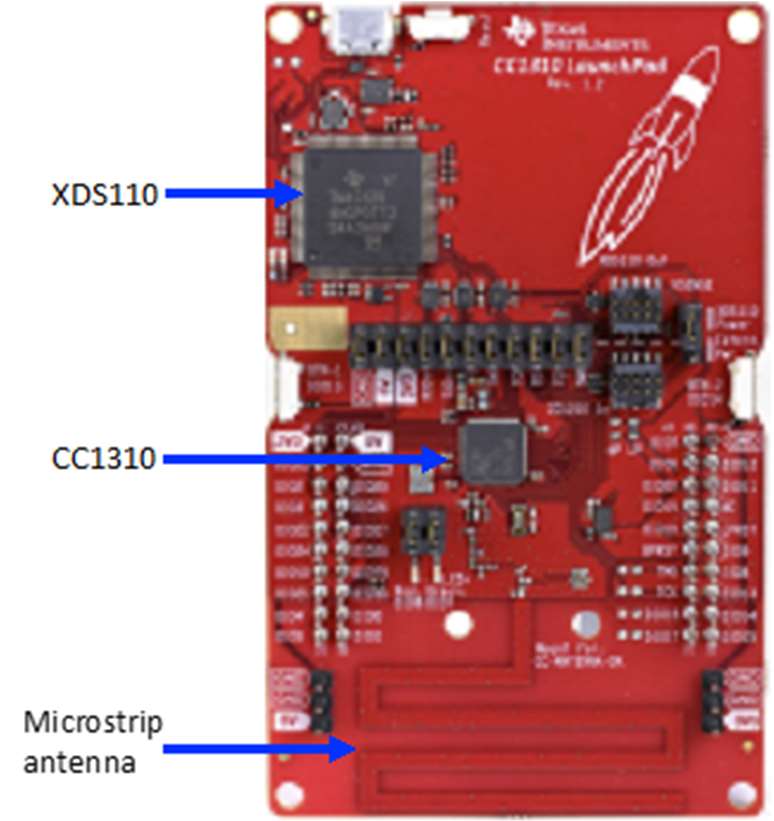
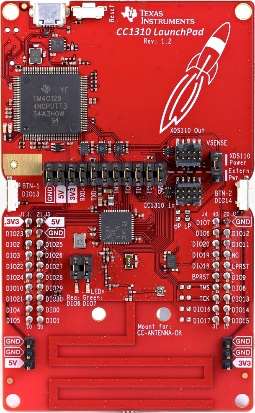
所提出的无线传感器网络(WSN)采用名为LaunchPad的TI CC1310评估板进行原型开发,图2展示了LaunchPad评估板。一个LaunchPad板包含MCU CC1310、调试器XDS110和微带天线。该LaunchPad还包含其他器件,如闪存、电平转换器和I/O引脚。在测量我们的原型时,仅激活了CC1310,而所有其他器件均被关闭以节省功耗。
TI CC1310器件集成了一个48兆赫ARM Cortex M3微控制器,用于运行主程序,以及一个负责亚千兆赫范围无线通信的射频模块。CC1310还包含一个12位模数转换器和一个低功耗传感器控制器,可配置用于处理模拟和数字传感器。TI CC1310器件的供电电压范围为1.8伏特至3.3伏特,在2伏特供电电压下的功耗(以消耗电流计)如表I所示。
表I:TI CC1310在以下情况下的功耗 2伏特的供电电压 [10]
| 状态 | 电流消耗 |
|---|---|
| 接收模式 | 10.8 毫安 |
| 10 dBm 以下的发射模式 发射功率 | 26.8 毫安 |
| 主动模式下MCU运行 在48 MHz下 | 5 mA |
| 待机模式 | 1.4 μA |
| 关断模式 | 370 纳安 |
C. 温度和电流传感器
电气温度传感器的类型,如热敏电阻、热电偶、电阻温度计和硅带隙温度传感器。热敏电阻通常在有限的温度范围内实现更高的精度,一般为−90 °C至130°C,且热敏电阻的温度系数可以是正的或负的。热敏电阻广泛用作浪涌电流限制器、温度传感器(通常为负温度系数或NTC型)、自恢复过流保护器以及自调节加热元件(通常为正温度系数或PTC型)[14]。本设计所采用的无线传感器网络(WSN)选用了具有‐4%/K负温度系数(NTC)的热敏电阻。
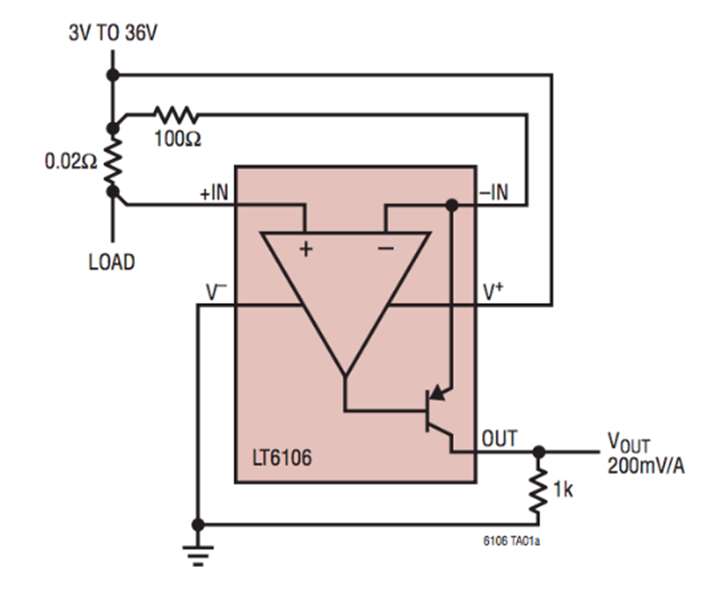
线性科技LT6106集成电路是一种高端电流检测放大器,被用于所提出的电路[15]。它通过外部检测电阻上的电压来监测电流。其宽供电电压范围为2.7伏特至44伏特,具有高精度和低电源电流特性。
使LT6106适用于所提出的应用。图3显示了一个使用LT6106集成电路的典型电流传感器监视器。该示例电路旨在检测5 A的负载电流。检测电阻0.02:在5 A负载电流下将负载电流转换为0.1 V,运算放大器将输入电压放大十倍(=௨௧௨௧௦௦௧ ௨௧ ௦௦௧= ଵଵ ஐஐ)。输出电压VOUT与负载电流成正比。
III. 提出的无线传感器节点
本节介绍了所提出的无线传感器网络的设计,包括数据采样、功耗降低方法和接口电路。我们构建了用于监测九个电池的无线传感器网络原型,并通过该原型说明了所提出的设计。
A. 原型系统
我们开发了一种无线传感器网络(WSN),并使用TI CC1310 LaunchPad评估板进行了原型实现。该原型监测九个串联连接的锂离子电池单体,具体包括各单体电池的电压和温度以及一个电流值。为了降低功耗,评估板采用接近最低的2伏特供电电压。原型系统的框图如图4所示。接口电路将温度(通过热敏电阻)和电流(通过电流传感器)转换为电压信号。共有19路数据需要采样,分别是9路电压、9路温度和1路电池组电流。
MCU CC1310具有八个嵌入式通道。通过使用四个4×1多路复用器(模拟器件ADG804)和三个嵌入式通道来覆盖19路数据通道,四个多路复用器的输出连接到另外四个嵌入式通道。如果对这八个嵌入式通道均使用32×1多路复用器,则一个MCU CC1310最多可覆盖256路通道,足以监测典型的电动汽车电池组。

B. 数据采样
我们使用TI Code Composer Studio对微控制器进行编程。该程序在TI专有的操作系统上运行系统(TI‐RTOS),可提供自动任务处理和电源管理。除了ARM Cortex M3主处理器外,该芯片还嵌入了一个专用的传感器控制器。传感器控制器控制12位ADC对来自接口电路的数据进行采样。在本系统中,电池电压和温度的采样速率为每秒10个样本,电流的采样速率为每秒400个样本。因此,电池电压每秒采样90次,电池温度每秒采样90次,电流每秒采样400次,总计每秒580个样本(sps)。
图5显示了我们原型无线传感器网络的数据采样点。传感器控制器每2.5毫秒唤醒一次,并命令模数转换器对电流(以电压形式)进行采样。同样,模数转换器每100毫秒对九个电池单元的电压和温度(以电压形式)进行一次采样,此外还对电流进行采样。采样的数据每100毫秒传输一次至接收端。这意味着采样的电流数据在传输前会累积100毫秒,而电压和温度数据则立即传输。
主处理器从传感器控制器获取采样数据集,并通过射频收发器将其传输。对于该原型,发射机的比特率和发射功率分别设置为500 Kbps和‐10 dBm。我们系统的接收端是另一块连接到计算机的LaunchPad。接收端LaunchPad通过UART以1.8 Mbps的数据速率与计算机通信。
C. 功耗降低
所提出的系统的节能体现在:(i) 减少主处理器的活动时间;以及(ii) 减少传输时间。为了实现第一个目标,ARM处理器仅在数据传输期间处于活动状态。在主处理器处于待机模式时,由传感器控制器负责数据的采样。
针对第二个目标,所提出的无线传感器网络系统将电流数据累积100毫秒,然后传输累积的电流数据以及电压和温度数据,从而减少整体传输时间。该方案的代价是电流数据的延迟增加,但这对于目标应用而言并非问题。所提出系统采用的另一项方案是减小传输数据大小。模数转换器的分辨率为12位,但处理器和存储器的基本单位为8位字节。因此,当模数转换器对数据进行采样时,通过添加四个虚拟位将采样数据扩展为16位或两个字节,这使得每次采样数据的传输数据大小增加了四位。所提出的方案将两个采样数据合并,如图6所示,生成三个字节。该方案将每两个四字节采样数据的传输数据大小减少为三字节。考虑到每次传输包含58个采样数据,每次传输的字节数从116减少到87。实际上,由于需要额外字节用于识别目的,我们原型的每次传输数据包大小设定为96字节。
D. 接口电路
图7中的接口电路显示了对单个单体电池的电压和温度以及电流传感器的感应。两个电阻将电池电压按比例降低,以满足模数转换器的输入电压范围。温度感应也依赖于两个电阻的分压,其中热敏电阻的下端电阻是可变的。LT6656集成电路为分压器提供参考电压。最后,电流感应采用电流传感器LT6106,该传感器感应检测电阻Rsense两端的电压。考虑到电流传感器的增益为ோோೀೆಿ,流经电池组的电流可计算得出。
$$
I_{sense} = \frac{V_{out}}{R_{sense} \cdot G}
$$
电压检测模块由九个分压电路组成,用于九个电池模块,如图8所示。$ V_{n_out} = a_n V_n $,其中n=1, 2, …, 9,$ a_n $为分压器的分压比。通过适当设置$ a_n $,使感应电压$ V_{n_out} $处于模数转换器的输入电压范围内。第nth个单体电池的电池电压计算为$ V_n - V_{(n-1)} = V_{n_out}/a_n - V_{(n-1)_out}/a_{n-1} $。


IV. 实验结果
我们验证了原型的工作情况,并测量了其功耗性能。本节描述了实验设置和测量结果。
A. 实验设置
我们使用电源和函数发生器而非实际电池来验证无线传感器网络(WSN)原型的运行,因为电池电压在实验中难以调节。接收端(RX)和发送端(TX)LaunchPad评估板的供电电压均设置为2伏特,发射功率设置为‐10 dBm。图9显示了该原型的实验设置。“Tx”评估板连接到接口电路,“Rx”评估板连接到计算机。

B. 操作
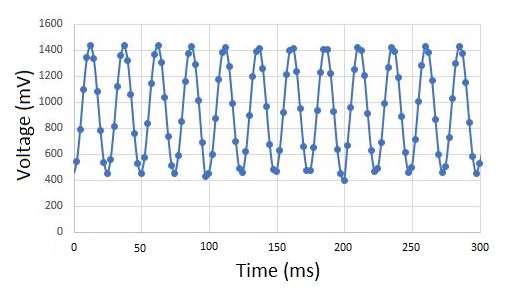
通过对每个数据通道施加正弦波形作为数据输入来验证其操作。例如,将一个40赫兹的正弦波形应用于电池电流输入。电流数据以每秒400个样本的速率进行采样,并将40个采样数据一起传输。图10显示了接收到的数据和重建波形。接收到的数据在时域中绘制,其中两个相邻数据之间相隔2.5毫秒。该原型表明数据能够成功传输和接收。

C. 功耗
主处理器每隔100毫秒唤醒一次并进入活动状态以处理数据传输。在传输事件期间会引起电流尖峰。在评估板的电源线上串联了一个10 Ω电阻,电阻两端的电压如图11所示。可以看出,传输期间的电流约为10毫安(或电阻两端电压为100毫伏),导致功耗为20毫瓦。在待机模式下,当传感器控制器进行测量时,电流降低至0.31毫安。使用万用表测量主处理器的平均电流,该电流为0.6毫安,导致功耗约为1.2毫瓦。

V. 结论
本文提出了一种用于监测汽车电池的低功耗无线传感器网络(WSN)及接口电路,specifically监测单体电池的电压和温度以及电池组的电流。同时还提出了降低所提出WSN功耗的方案。该WSN使用TI LaunchPad评估板进行了原型设计,能够监测九个电池单元。该原型验证了所提出WSN的运行,平均功耗为1.2 mW。考虑到能量采集电路[3]可从汽车中采集3.4 mW的能量,因此该原型可通过汽车能量收集供电。

















 477
477

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









