



 博客介绍了深度优先搜索策略,即从起点出发,标记走过的点,有未走点就前进,走不通则回退。还提到可借此判断从某点出发能否到终点及记录路径,最后提及深度优先遍历图上所有节点。
博客介绍了深度优先搜索策略,即从起点出发,标记走过的点,有未走点就前进,走不通则回退。还提到可借此判断从某点出发能否到终点及记录路径,最后提及深度优先遍历图上所有节点。
一:深度优先搜索(Depth-First-Search)
从起点出发,走过的点要做标记,发现有没走过的点,就随意挑一个往前走,走不了就回退,此种路径搜索策略就称为“深度优先搜索”,简称“深搜”。
其实称为“远度优先搜索”更容易理解些。因为这种策略能往前走一步就往前走一步,总是试图走得更远。所谓远近(或深度),就是以距离起点的步数来衡量的。
1:判断从V出发是否能走到终点:
bool Dfs(V) {
if( V 为终点)
return true;
if( V 为旧点)
return false;
将V标记为旧点;
对和V相邻的每个节点U {
if( Dfs(U) == true)
return true;
}
return false;
}
int main() {
将所有点都标记为新点;
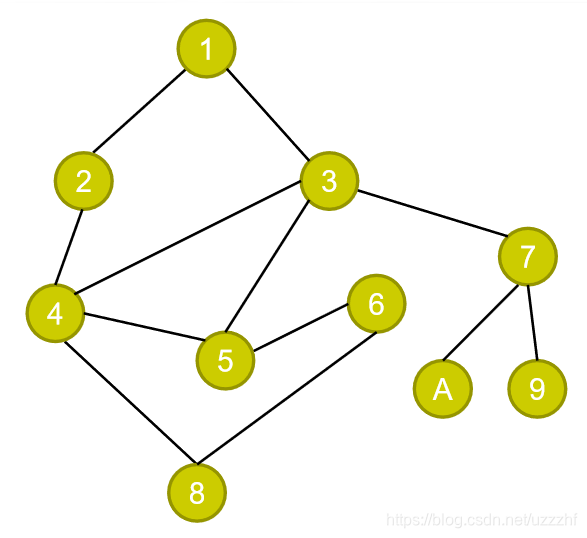
起点 = 1
终点 = 8
cout << Dfs(起点);
}
2:判断从V出发是否能走到终点,如果能,要记录路径:
Node path[MAX_LEN]; //MAX_LEN取节点总数即可
int depth;
bool Dfs(V) {
if( V为终点){
path[depth] = V;
return true;
}
if( V 为旧点)
return false;
将V标记为旧点;
path[depth]=V;
++depth;
对和V相邻的每个节点U {
if( Dfs(U) == true)
return true;
}
--depth;
return false;
}
int main() {
将所有点都标记为新点;
depth = 0;
if( Dfs(起点)) {
for(int i = 0;i <= depth; ++ i)
cout << path[i] << endl;
}
}
1->3->7->9=>7->A=>7=>3->5->6->8
path: 1,3,5,6,8
二:深度优先遍历图上所有节点

Dfs(V) {
if( V是旧点)
return;
将V标记为旧点;
对和V相邻的每个点 U {
Dfs(U);
}
}
int main() {
将所有点都标记为新点;
while(在图中能找到新点k)
Dfs(k);
}


















 1494
1494

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











