




 文章介绍了一种名为DD3D的端到端单级单目3D对象检测器,它避免了伪激光雷达方法的局限性,同时能从深度预训练中获益。DD3D在KITTI-3D和NuScenes基准测试上实现了最先进的结果。
文章介绍了一种名为DD3D的端到端单级单目3D对象检测器,它避免了伪激光雷达方法的局限性,同时能从深度预训练中获益。DD3D在KITTI-3D和NuScenes基准测试上实现了最先进的结果。
1. 论文信息
论文标题:《Is Pseudo-Lidar needed for Monocular 3D Object detection?》
代码:GitHub - TRI-ML/dd3d: Official PyTorch implementation of DD3D: Is Pseudo-Lidar needed for Monocular 3D Object detection? (ICCV 2021), Dennis Park*, Rares Ambrus*, Vitor Guizilini, Jie Li, and Adrien Gaidon.
论文:https://arxiv.org/abs/2108.06417
2. 摘要
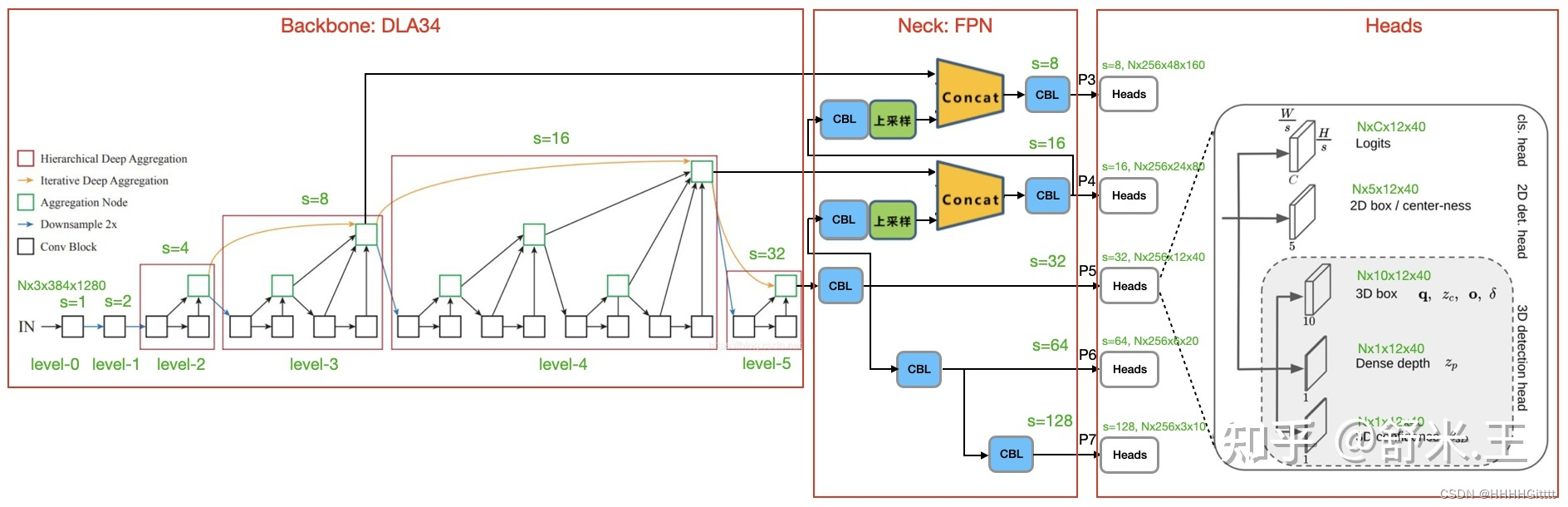
从单幅图像检测 3D 对象的最新进展利用单眼深度估计作为生成 3D 点云的方法,将相机变成伪激光雷达传感器。 这些两级检测器随着中间深度估计网络的准确性而提高,而中间深度估
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2538
2538

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









