




OpenCV-4.8.0
https://opencv.org/releases/
(alpha) D:\Deploy>wget https://cyfuture.dl.sourceforge.net/project/opencvlibrary/4.8.0/opencv-4.8.0-windows.exe?viasf=1
--2025-02-02 13:40:22-- https://cyfuture.dl.sourceforge.net/project/opencvlibrary/4.8.0/opencv-4.8.0-windows.exe?viasf=1
Resolving cyfuture.dl.sourceforge.net (cyfuture.dl.sourceforge.net)... 49.50.119.27
Connecting to cyfuture.dl.sourceforge.net (cyfuture.dl.sourceforge.net)|49.50.119.27|:443... connected.
HTTP request sent, awaiting response... 200 OK
Length: 176191149 (168M) [application/octet-stream]
Saving to: 'opencv-4.8.0-windows.exe@viasf=1'
opencv-4.8.0-windows.exe@vias 100%[=================================================>] 168.03M 113KB/s in 19m 58s
2025-02-02 14:00:22 (144 KB/s) - 'opencv-4.8.0-windows.exe@viasf=1' saved [176191149/176191149]
include & lib & path
D:\Deploy\opencv-4.8.0\build\include
└─ opencv2
D:\Deploy\opencv-4.8.0\build\x64\vc16\lib
│ opencv_world480.lib
│ opencv_world480d.lib
└─ ...
D:\Deploy\opencv-4.8.0\build\x64\vc16\bin
│ opencv_world480.dll
│ opencv_world480d.dll
└─ ...
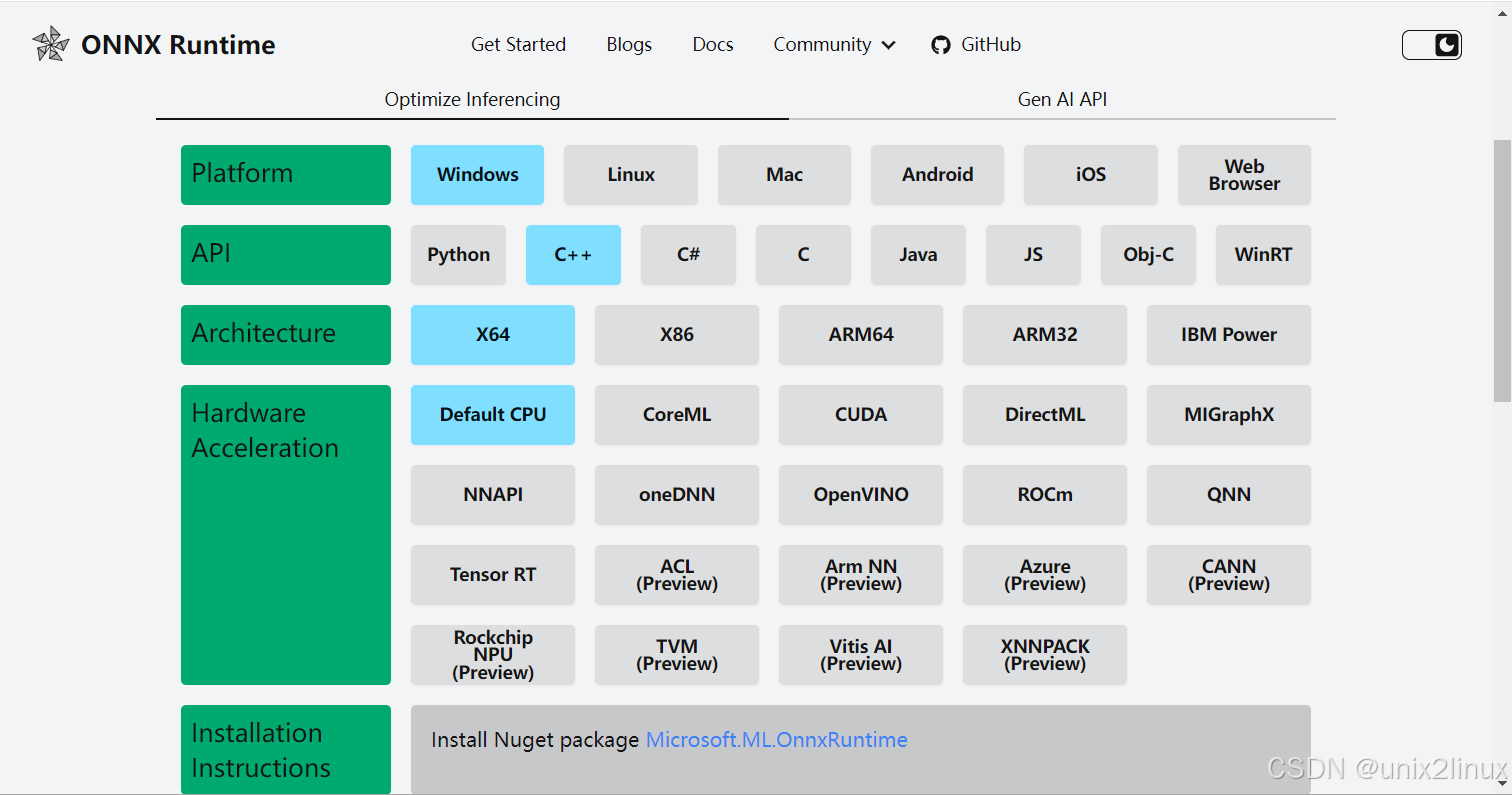
ONNX Runtime 1.20.1
https://onnxruntime.ai/getting-started
⇒ [ Install Nuget package Microsoft.ML.OnnxRuntime ]
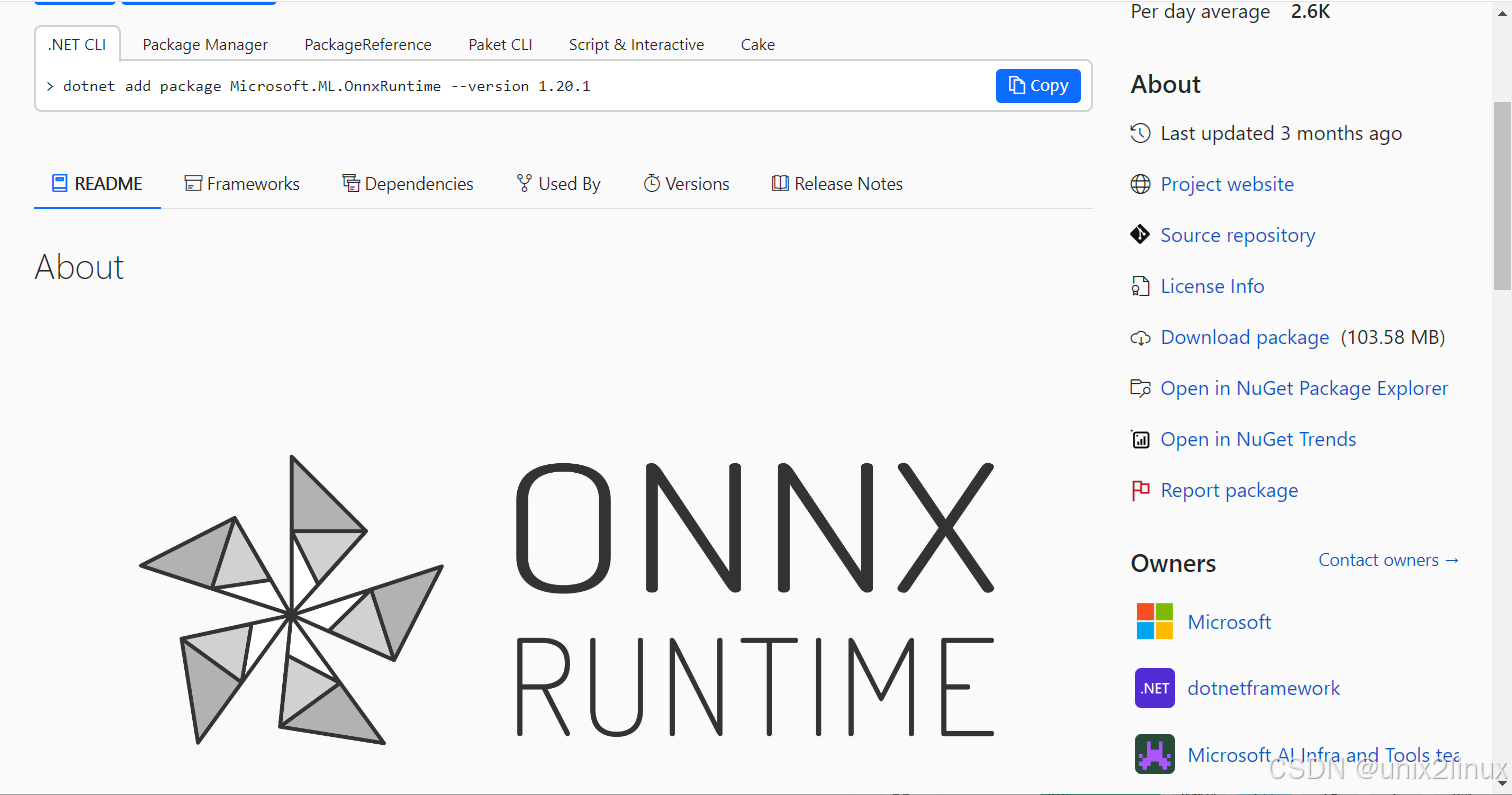
https://www.nuget.org/packages/Microsoft.ML.OnnxRuntime
⇒ [ Download package (103.58 MB) ]
include & lib & path
D:\Deploy\microsoft.ml.onnxruntime.1.20.1\build\native\include
D:\Deploy\microsoft.ml.onnxruntime.1.20.1\runtimes\win-x64\native
onnxruntime.lib;onnxruntime_providers_shared.lib
PATH=D:\Deploy\microsoft.ml.onnxruntime.1.20.1\runtimes\win-x64\native;%PATH%
Export classes from YOLOv5s to txt
import torch
checkFile = 'yolov5s.pt'
def listClasses(modelFile = checkFile):
model = torch.load(modelFile, weights_only=False, map_location='cpu')
for key in model:
node = model[key]
subkey = 'names'
if hasattr(node, subkey):
for one in node.names:
print(one)
if __name__ == '__main__':
if True:
listClasses('yolov5s.pt')
Export model from YOLOv5s to ONNX
python export.py --weights yolov5s.pt --include onnx
scenario3.cpp
#include <onnxruntime_cxx_api.h>
#include <opencv2/opencv.hpp>
#include <fstream>
#include <iostream>
#include <string>
using namespace std; // c++标准库中所有标识符都被定义于一个名为std的namespace中
using namespace cv;
std::vector<std::string> readClassNames(std::string labels_txt_file)
{
std::vector<std::string> classNames;
std::ifstream fp(labels_txt_file);
if (!fp.is_open()) {
printf("could not open file...\n");
exit(-1);
}
std::string name;
while (!fp.eof()) {
std::getline(fp, name);
if (name.length())
classNames.push_back(name);
}
fp.close();
return classNames;
}
int main(int argc, char* argv[]) {
Ort::Env env(ORT_LOGGING_LEVEL_WARNING, "runtime");
Ort::SessionOptions session_options;
std::wstring model_path = L"D:\\Deploy\\scenario\\models\\yolov5s.onnx";
// 设置了会话在执行单个操作时使用的线程数4
session_options.SetIntraOpNumThreads(4);
// 设置启用所有可用的图优化
session_options.SetGraphOptimizationLevel(GraphOptimizationLevel::ORT_ENABLE_ALL);
Ort::Session session(env, model_path.c_str(), session_options);
// 加载标签
std::string label_path = "D:\\Deploy\\scenario\\models\\yolov5s.txt";
std::vector<std::string> labels = readClassNames(label_path);
// 加载图像
std::string image_path = "D:\\Deploy\\scenario\\images\\1734613232.139.0.jpg";
cv::Mat frame = cv::imread(image_path);
if (frame.empty()) {
std::cerr << "Error loading image!" << std::endl;
return -1;
}
std::vector<std::string> input_node_names;
size_t numInputNodes = session.GetInputCount();
Ort::AllocatorWithDefaultOptions allocator;
int input_w = 0;
int input_h = 0;
int batch_size = 0;
int channel = 0;
int w = frame.cols;
int h = frame.rows;
int _max = std::max(h, w);
for (int i = 0; i < numInputNodes; i++) {
auto input_name = session.GetInputNameAllocated(i, allocator);
input_node_names.push_back(input_name.get());
Ort::TypeInfo input_type_info = session.GetInputTypeInfo(i);
auto input_tensor_info = input_type_info.GetTensorTypeAndShapeInfo();
auto input_dims = input_tensor_info.GetShape();
input_w = input_dims[3];
input_h = input_dims[2];
channel = input_dims[1];
batch_size = input_dims[0];
std::cout << "input format: NxCxHxW = " << input_dims[0] << "x" << input_dims[1] << "x" << input_dims[2] << "x" << input_dims[3] << std::endl;
}
cv::Mat image = cv::Mat::zeros(cv::Size(_max, _max), CV_8UC3);
cv::Rect roi(0, 0, w, h);
frame.copyTo(image(roi));
cv::Mat blob = cv::dnn::blobFromImage(image, 1 / 255.0, cv::Size(input_w, input_h), cv::Scalar(0, 0, 0), true, false);
size_t tpixels = input_h * input_w * channel;
std::array<int64_t, 4> input_shape_info{ batch_size, channel, input_h, input_w };
auto allocator_info = Ort::MemoryInfo::CreateCpu(OrtDeviceAllocator, OrtMemTypeCPU);
Ort::Value input_tensor_ = Ort::Value::CreateTensor<float>(allocator_info, blob.ptr<float>(), tpixels, input_shape_info.data(), input_shape_info.size());
size_t numOutputNodes = session.GetOutputCount();
std::vector<std::string> output_node_names;
int output_h = 0;
int output_w = 0;
for (int i = 0; i < numOutputNodes; i++) {
Ort::TypeInfo output_type_info = session.GetOutputTypeInfo(i);
auto output_tensor_info = output_type_info.GetTensorTypeAndShapeInfo();
auto output_dims = output_tensor_info.GetShape();
output_h = output_dims[1];
output_w = output_dims[2];
auto out_name = session.GetOutputNameAllocated(i, allocator);
output_node_names.push_back(out_name.get());
std::cout << "output format : HxW = " << output_dims[1] << "x" << output_dims[2] << std::endl;
}
const std::array<const char*, 1> inputNames = { input_node_names[0].c_str() };
const std::array<const char*, 1> outNames = { output_node_names[0].c_str() };
std::vector<Ort::Value> ort_outputs;
try {
ort_outputs = session.Run(Ort::RunOptions{ nullptr }, inputNames.data(), &input_tensor_, numInputNodes, outNames.data(), outNames.size());
}
catch (std::exception e) {
std::cout << e.what() << std::endl;
}
float x_factor = image.cols / static_cast<float>(input_w);
float y_factor = image.rows / static_cast<float>(input_h);
const float* pdata = ort_outputs[0].GetTensorMutableData<float>();
cv::Mat dout(output_h, output_w, CV_32F, (float*)pdata);
std::vector<cv::Rect> boxes;
std::vector<int> classIds;
std::vector<float> confidences;
int nLabelSize = labels.size();
for (int i = 0; i < dout.rows; i++) {
cv::Mat classes_scores = dout.row(i).colRange(5, nLabelSize + 5);
cv::Point classIdPoint;
double score;
minMaxLoc(classes_scores, 0, &score, 0, &classIdPoint);
float conf = dout.at<float>(i, 4);
//预测框置信度
if (conf < 0.15) {
continue;
}
//类别置信度判断
if (score > 0.35) {
float cx = dout.at<float>(i, 0);
float cy = dout.at<float>(i, 1);
float ow = dout.at<float>(i, 2);
float oh = dout.at<float>(i, 3);
int x = static_cast<int>((cx - 0.5 * ow) * x_factor);
int y = static_cast<int>((cy - 0.5 * oh) * y_factor);
int width = static_cast<int>(ow * x_factor);
int height = static_cast<int>(oh * y_factor);
cv::Rect box;
box.x = x;
box.y = y;
box.width = width;
box.height = height;
boxes.push_back(box);
classIds.push_back(classIdPoint.x);
confidences.push_back(score);
}
}
std::vector<int> indexes;
cv::dnn::NMSBoxes(boxes, confidences, 0.70, 0.45, indexes);
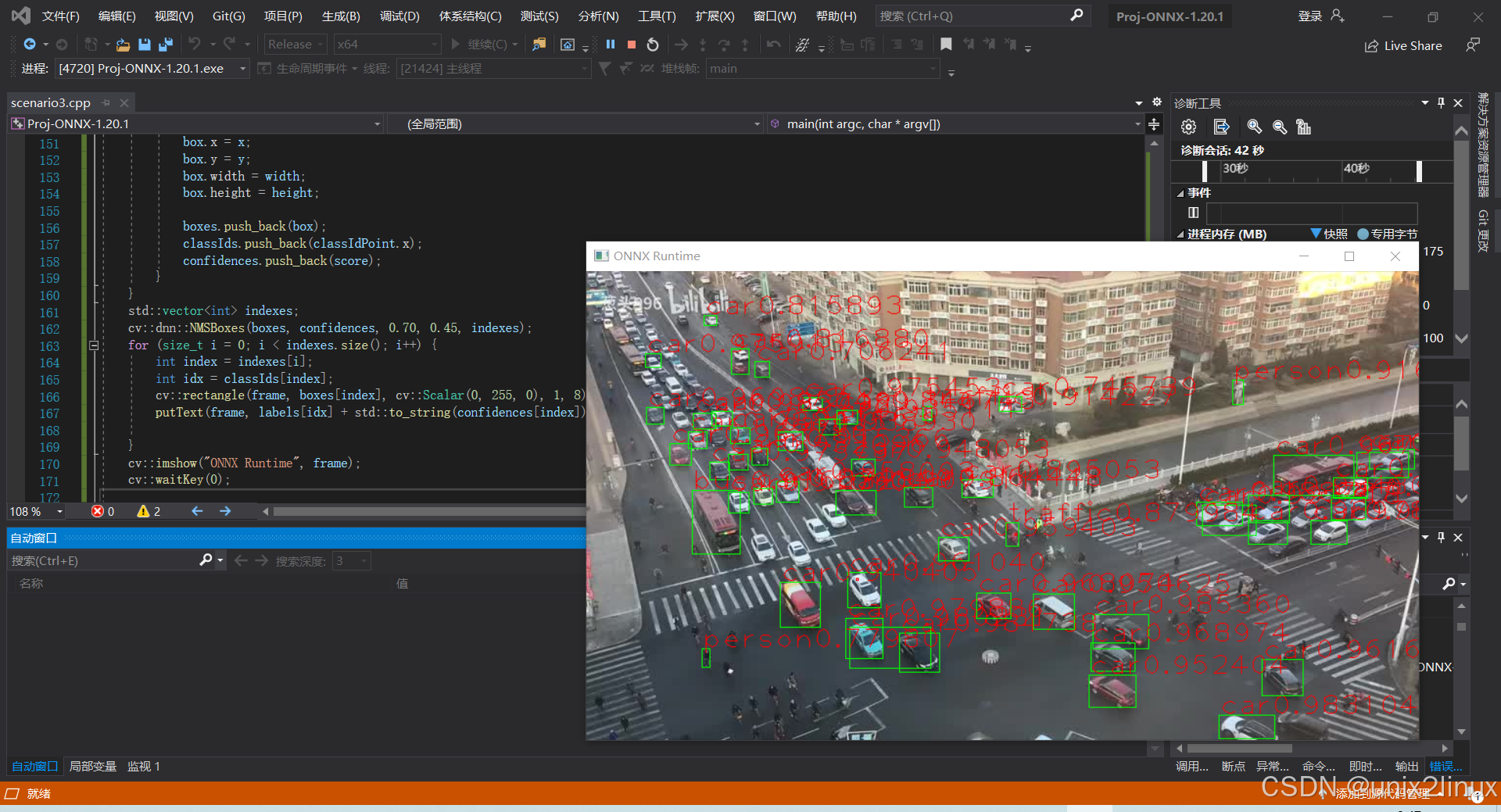
for (size_t i = 0; i < indexes.size(); i++) {
int index = indexes[i];
int idx = classIds[index];
cv::rectangle(frame, boxes[index], cv::Scalar(0, 255, 0), 1, 8);
putText(frame, labels[idx] + std::to_string(confidences[index]), cv::Point(boxes[index].tl().x, boxes[index].tl().y), cv::FONT_HERSHEY_PLAIN, 2.0, cv::Scalar(0, 0, 255), 1, 3);
}
cv::imshow("YOLOv5+ONNXRUNTIME", frame);
cv::waitKey(0);
session_options.release();
session.release();
return 0;
}
var args
#include <fstream>
#include <iostream>
#include <string>
#include <locale>
#include <codecvt>
std::string sysMode, sysClass, sysInput;
void blankLine()
{
std::cout << " " << std::endl;
}
std::wstring string2wstring(std::string str)
{
std::wstring strTmp;
std::wstring_convert<std::codecvt_utf8_utf16<wchar_t>> conv;
strTmp = conv.from_bytes(str);
return strTmp;
}
std::string wstring2string(std::wstring wstr)
{
std::string strTmp;
std::wstring_convert<std::codecvt_utf8<wchar_t>> myconv;
strTmp = myconv.to_bytes(wstr);
return strTmp;
}
std::string chars2string(char* pChars)
{
std::string strTmp = pChars;
return strTmp;
}
std::wstring chars2wstring(char* pChars)
{
std::wstring strTmp;
std::wstring_convert<std::codecvt_utf8<wchar_t>> conv;
strTmp = conv.from_bytes(pChars);
return strTmp;
}
void processArgs(int argc, char* argv[])
{
if (true) {
int opt;
blankLine();
while ((opt = getopt(argc, argv, "m:c:i:")) != -1)
{
switch (opt)
{
case 'm':
sysMode = chars2string(optarg);
std::cout << "-m " << sysMode << std::endl;
break;
case 'c':
sysClass = chars2string(optarg);
std::cout << "-c " << sysClass << std::endl;
break;
case 'i':
sysInput = chars2string(optarg);
std::cout << "-i " << sysInput << std::endl;
break;
default:
std::cerr << "UNKNONWN : " << opt << std::endl;
break;
}
}
blankLine();
}
}
onnx.cmd
@SET PREDICT_MODE="D:\Deploy\scenario\models\fireworksv1.onnx"
@SET PREDICT_CLASS="D:\Deploy\scenario\models\fireworksv1.txt"
@SET PREDICT_INPUT="D:\Deploy\scenario\videos\demo_00301.jpg"
@SET PREDICT_MODE="D:\Deploy\scenario\models\yolov5s.onnx"
@SET PREDICT_CLASS="D:\Deploy\scenario\models\yolov5s.txt"
@SET PREDICT_INPUT="D:\Deploy\scenario\images\1734613232.139.0.jpg"
@Proj-ONNX-1.20.1.exe -m %PREDICT_MODE% -c %PREDICT_CLASS% -i %PREDICT_INPUT%




















 1397
1397

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









